
النمل مخلوقات مدهشة، فهي تحتاج إلى موارد قليلة ومع ذلك يمكنها القيام بالكثير.
تتطلب العديد من الروبوتات ذات الأرجل الستة ما يصل إلى ثلاثة محركات سيرفو لكل رجل، وهذا يعني أنه في الإجمالي تحتاج إلى 18 محرك سيرفو تستهلك كمية هائلة من الطاقة، وذلك يتعارض مع مبدأ الاقتصاد في الاستهلاك الذي تتميز به النملة الحقيقية.
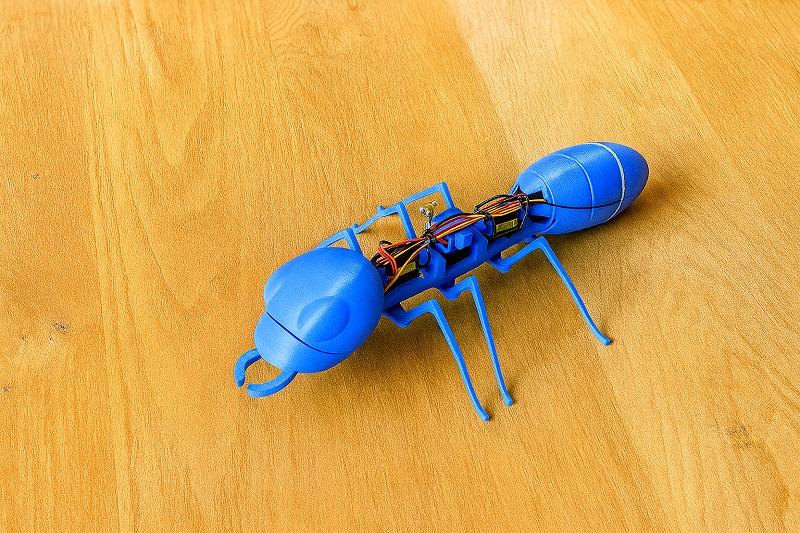
ولكن باستخدام ثلاثة محركات سيرفو فقط (+1 ملقط لقرون الإستشعار) وبعض الميكانيكا البسيطة تمكنت من تحقيق نموذج مبسط لنملة آلية (بوزن 114 جرام بالإضافة إلى البطارية).
المعرفة الأساسية بـ Arduino مطلوبة لتنفيذ هذا المشروع.
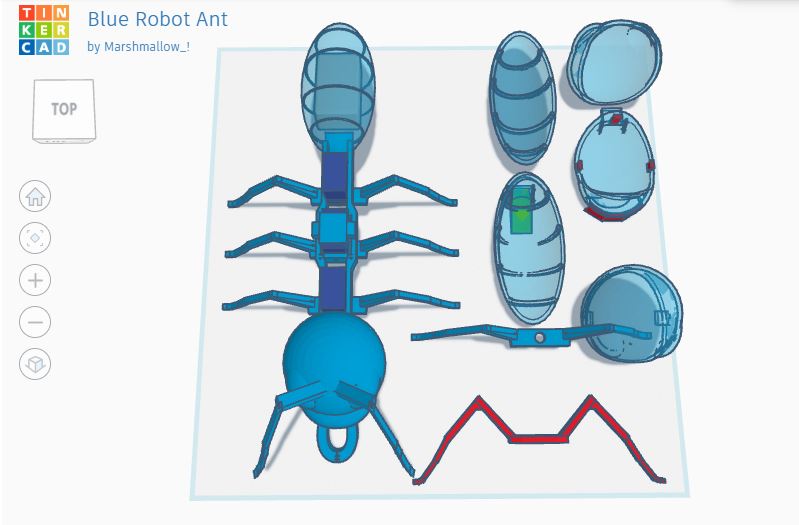
ملفات التصميم
تم تصميم جميع الأجزاء باستخدام برنامج Tinkercad وتحضيرها باستخدام برنامج Ultimaker Cura، وهذه الملفات التي تحتاجها:
لتحميل ملف تصميم هيكل جسم النملة .stl اضغط هنـــا.
لتحميل ملف تصميم الأرجل .stl اضغط هنـــا.
لتحميل ملف تصميم الغطاء .stl اضغط هنـــا.
لتحميل ملف تصميم رأس النملة .stl اضغط هنـــا.
لتحميل ملف تصميم ذيل النملة .stl اضغط هنـــا.

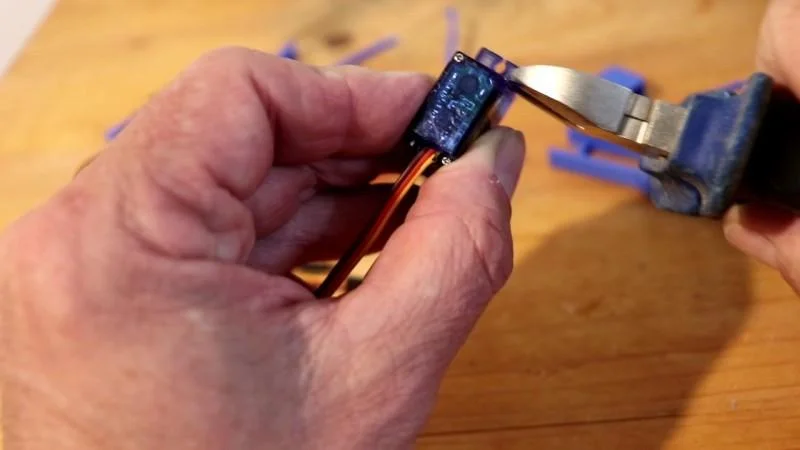
أولاً قم بإزالة الزوائد الموجودة على جميع محركات السيرفو باستخدام الكماشة أو المنشار، ثم قم بتنعيمها بالمبرد.
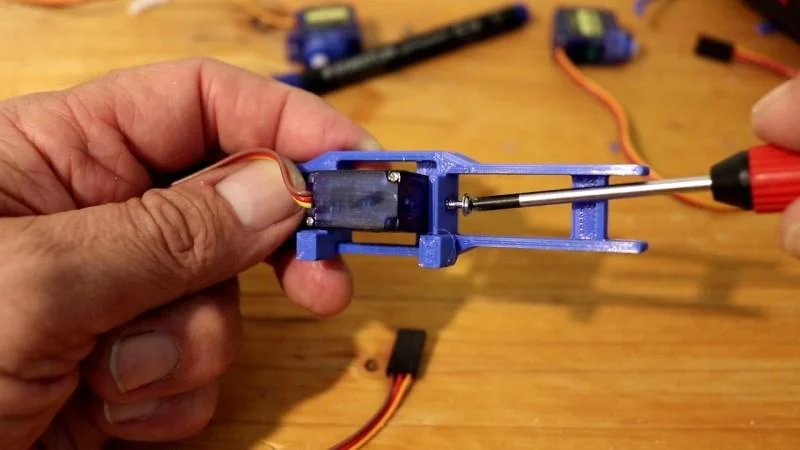
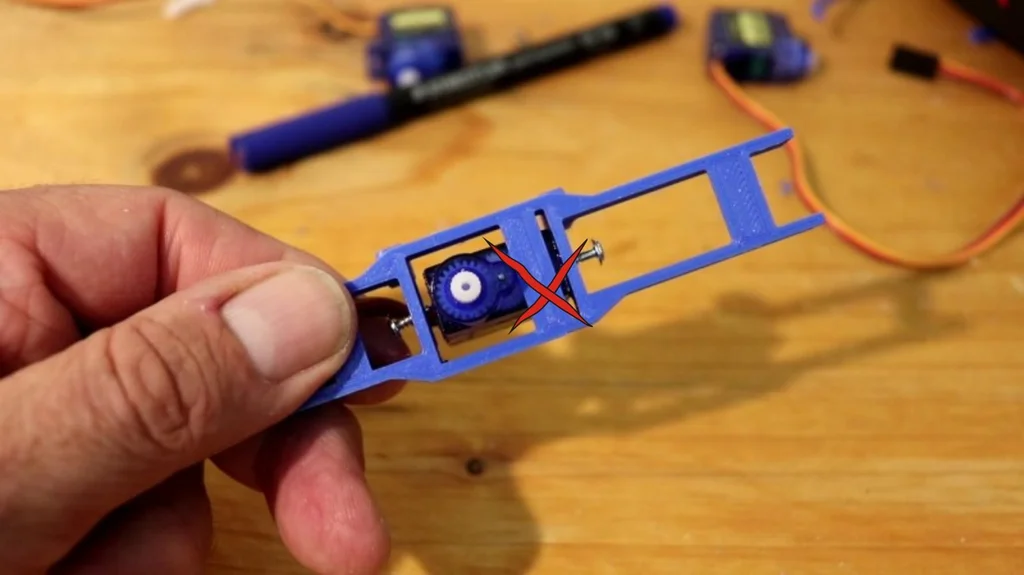
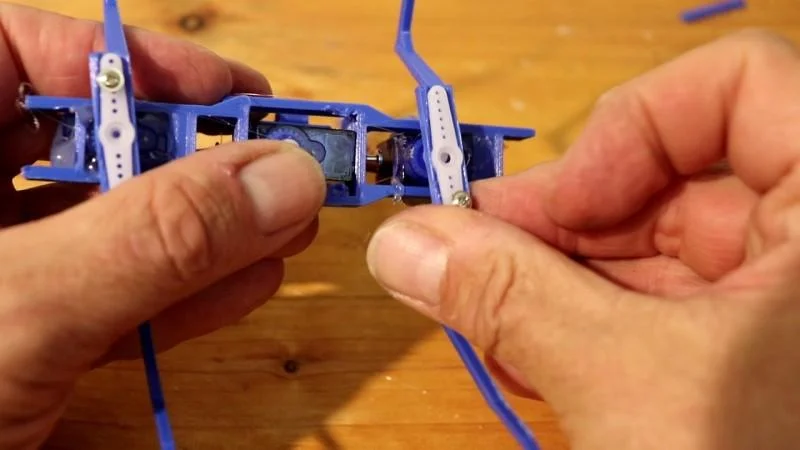
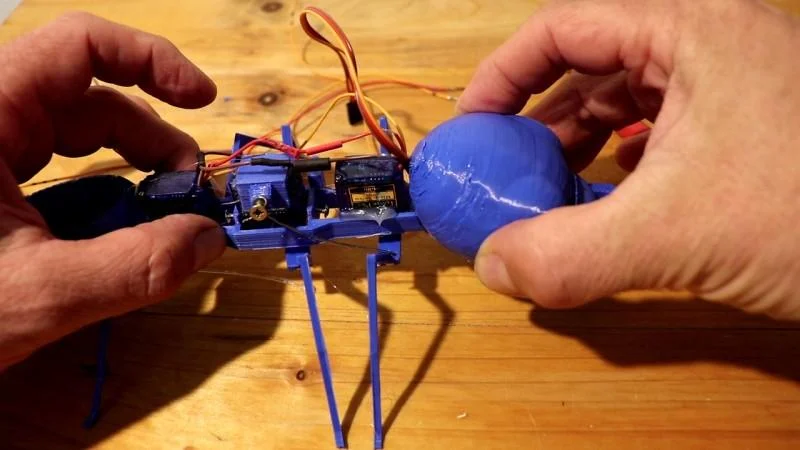
بعد ذلك ابدأ بطباعة هيكل الروبوت ثم ثبت محرك السيرفو الثاني (Servo 2) باستخدام مسمارين مدببين كما هو موضح في الصورة، ويجب أن يكون محرك السيرفو المركزي قادراً على الحركة بشكل متأرجح، وقم أيضاً بتركيب غطاء صغير في هذا الجزء لتثبيت مسمار لاحقاً.
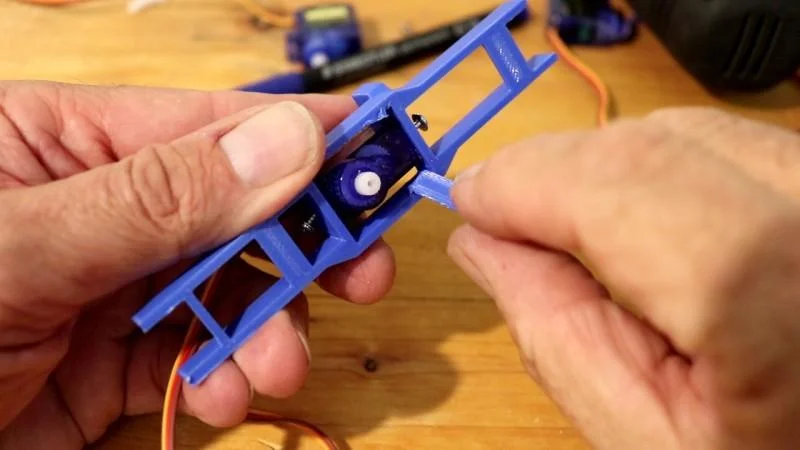
والآن قم بتثبيت محركي السيرفو الأول والثالث (Servo 1 و Servo 3) بالإضافة إلى غطاء محرك السيرفو الثاني باستخدام الغراء الساخن.
وقبل تركيب الأرجل يجب معايرة محركات السيرفو لتكون في وضعها المركزي، ولتحقيق ذلك قم باستخدام البرنامج الصغير centerlegs.ino لضبط جميع محركات السيرفو على زاوية 90 درجة.
لتحميل ملف الأرجل المركزية .ino اضغط هنـــا.



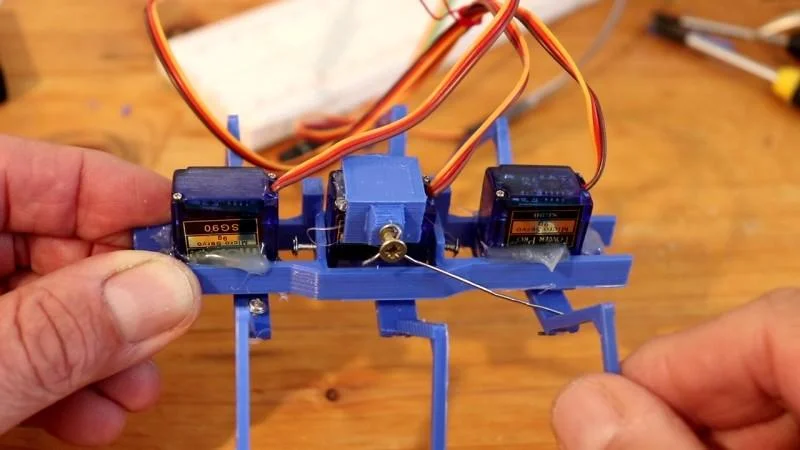
كل محرك سيرفو يحمل زوجاً من الأرجل، بحيث يتحرك بزوايا محدودة للأمام والخلف، ويعمل محركا السيرفو الأول والثالث (Servo 1 و Servo 3) بشكل متزامن، لذا يمكننا التفكير في توصيلهما بنفس المنفذ (Pin) في متحكم الأردوينو.
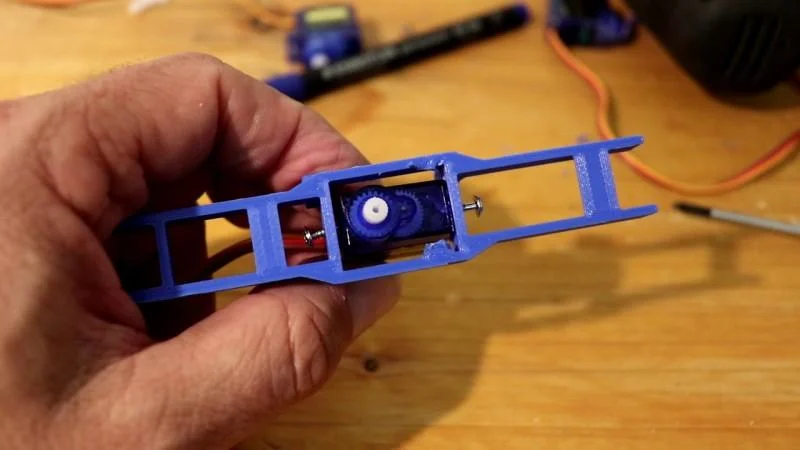
بينما يتحرك محرك السيرفو الثاني (Servo 2) في الاتجاه المعاكس، ويجب أن يتأرجح لضمان تحقيق الجر المناسب للأرجل على الأرض، وهذا التأرجح يحدث نتيجة اتصال محرك السيرفو الأول (Servo 1) بمشبك ورق.
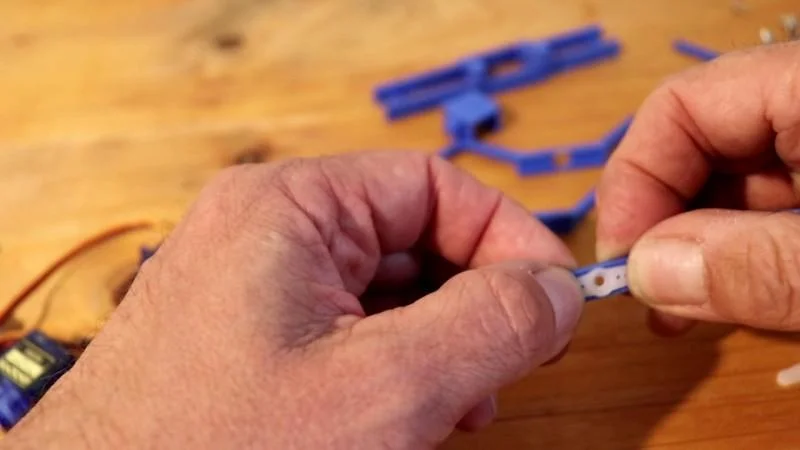
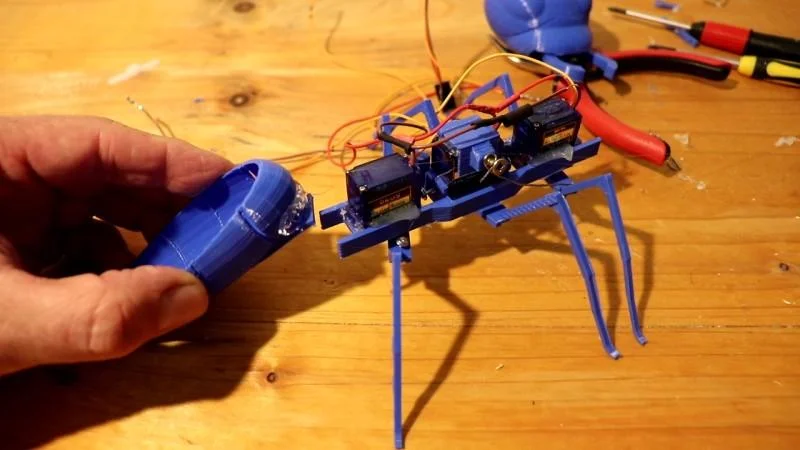
أخيراً قم بطباعة الأرجل وثبت كل رجل في محرك السيرفو الخاص بها، وقد تحتاج إلى توسيع الثقوب قليلاً باستخدام المثقاب لتتناسب مع المحركات.

باستخدام المسامير ومشبك الورق قم بتوصيل لوحة تثبيت أرجل محرك السيرفو الأول (Servo 1) بغطاء محرك السيرفو الثاني (Servo 2)، وهنا يجب أن يتحرك هذا الغطاء بشكل متأرجح ومتناغم مع حركة محرك السيرفو الأول.
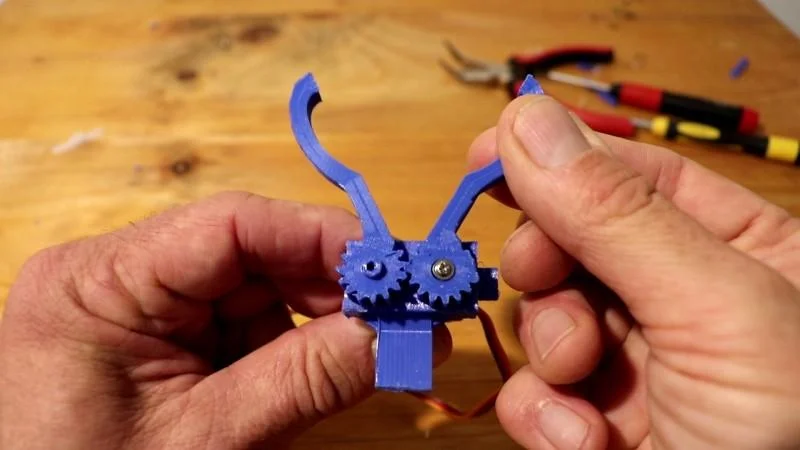
الملقط ليس جزءاً أساسياً في التصميم، لكنه إضافة جميلة تعزز وظائف الروبوت.
أولاً قم بإدخال محرك السيرفو (بدون ذراع) داخل الإطار، ثم اضبط المحرك على زاوية 90 درجة باستخدام برنامج "centerlegs.ino" المذكور في الخطوة الثانية، ثم ضع قطعة الملقط الأولى على الترس الداخلي للمحرك وثبتها بمسمار السيرفو، ثم ضع القطعة الثانية على المحور.
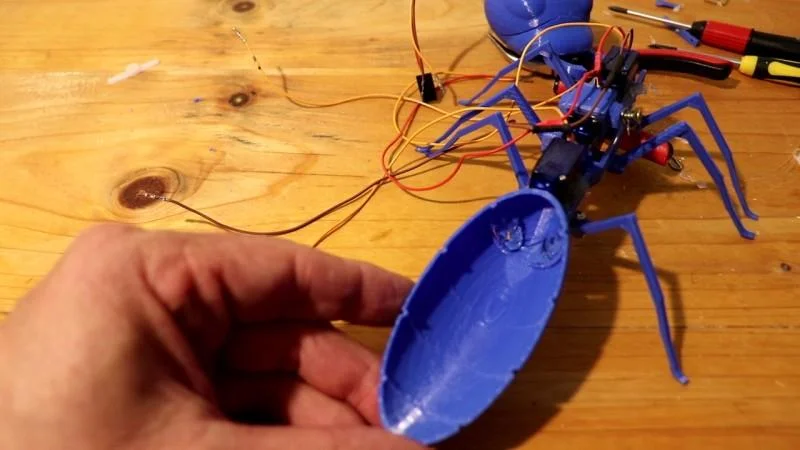
بعد ذلك قم بلصق الملقط مقلوباً في الجزء العلوي من الرأس باستخدام الغراء الساخن ثم أغلق الرأس، وبعد ذلك ضع الرأس على نهاية هيكل الجسم الرئيسي والصقه جيداً.
ملفات التصميم المطلوبة:
لتحميل ملف تصميم الملقط 1 .stl اضغط هنــا.
لتحميل ملف تصميم الملقط 2 .stl اضغط هنــا.

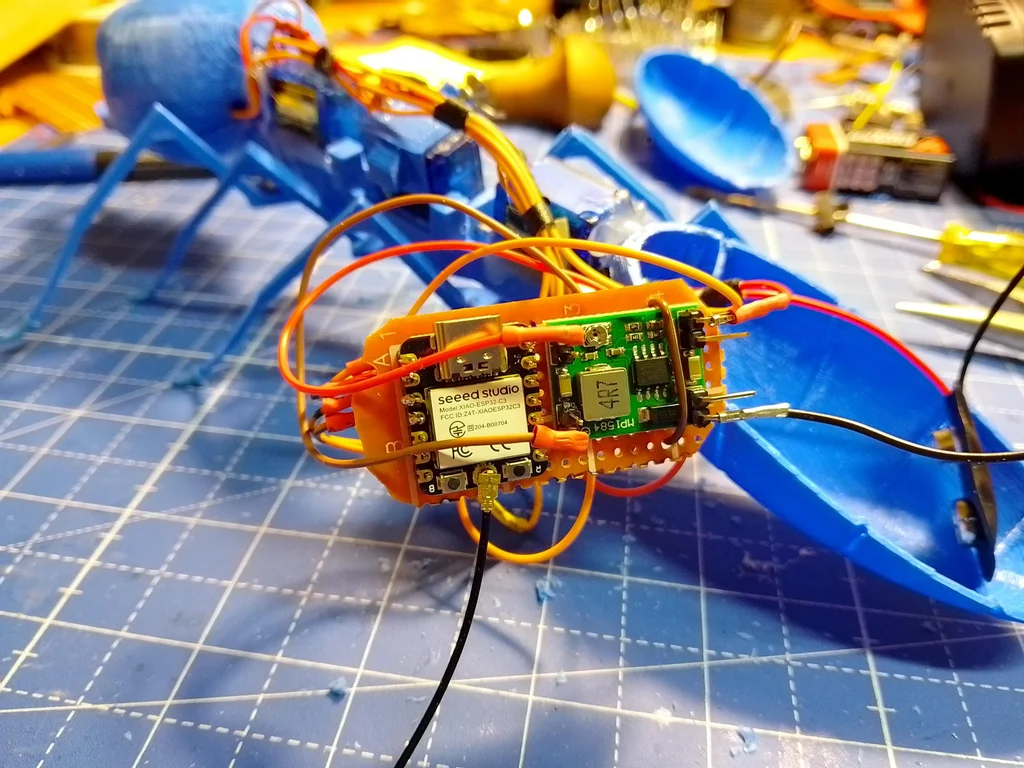
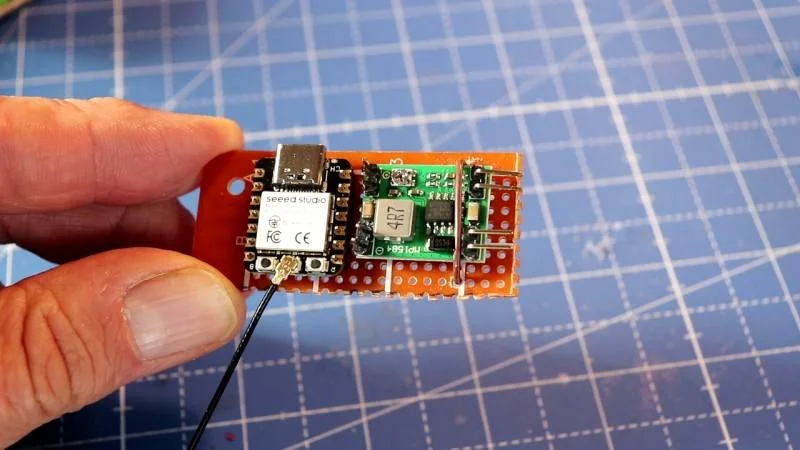
يتم تثبيت الجزء السفلي الخلفي أيضاً على هيكل الجسم الرئيسي باستخدام الغراء، حيث سيكون هذا الجزء مسؤولاً عن حمل البطارية ومتحكم الأردوينو الصغير (microcontroller).
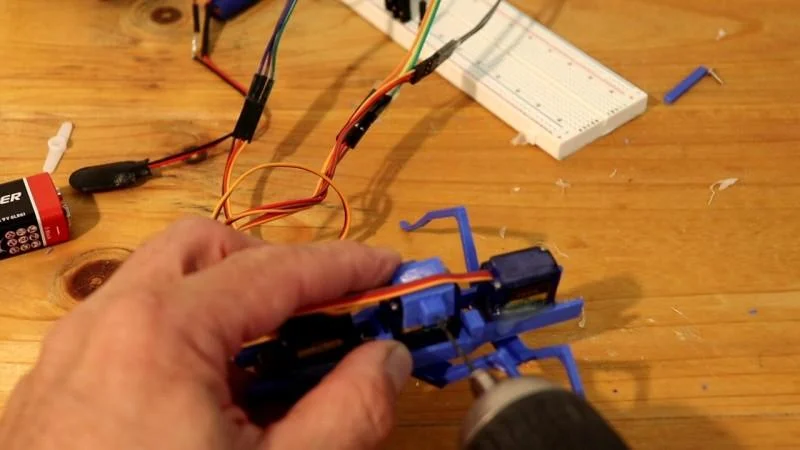
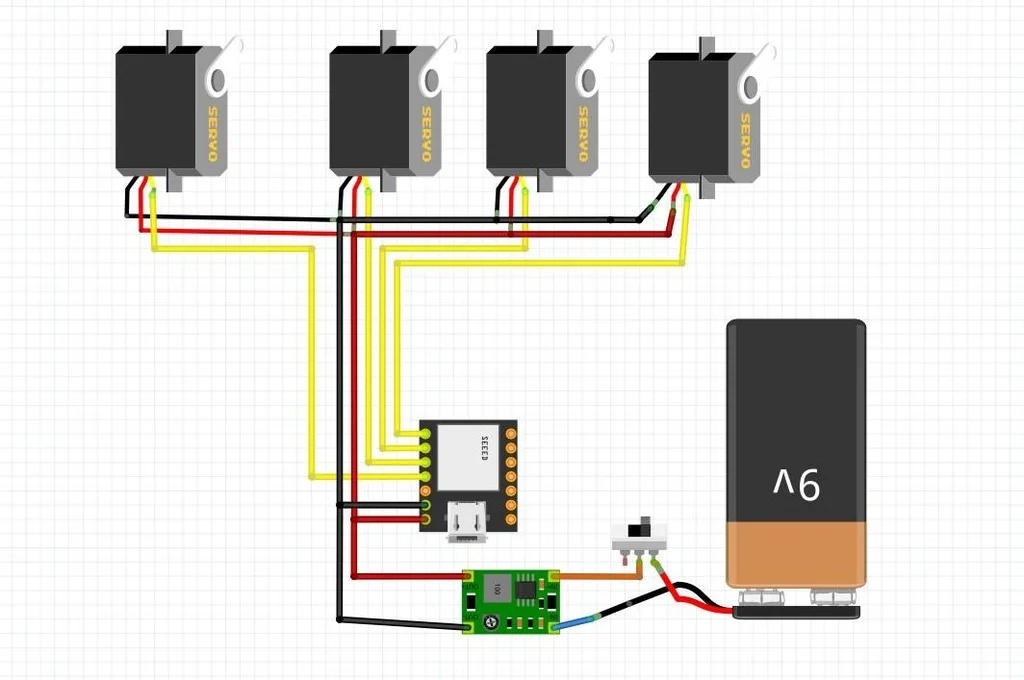
توفر بطارية الـ 9 فولت طاقة كافية لتشغيل محركات السيرفو، لكن يجب تخفيض الجهد إلى 5 فولت باستخدام محول تخفيض الجهد (buck converter).
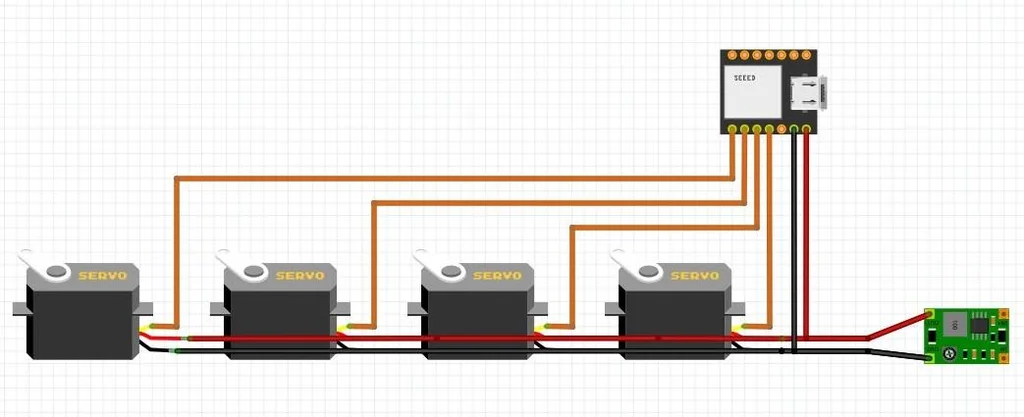
يتم توصيل تغذية الطاقة للأربعة محركات سيرفو على التوازن عبر خط الـ 5 فولت، بينما يتم توصيل أسلاك البيانات بمتحكم ESP32، ولا حاجة لتوصيلات إضافية لكن يمكن إضافة أجهزة استشعار (sensors) أو مصابيح LED إذا رغبت.
يجب تحميل برنامج "Blue_Ant-RemoteXY.ino" على متحكم ESP32، ويمكنك العثور على معلومات حول كيفية تنفيذ ذلك في دليل "كيف تبدأ العمل مع لوحة ESP32-C3 XIAO".
حيث يحتوي البرنامج بالفعل على وظيفة التحكم عن بعد المذكورة في الخطوة السابعة.
اضغط هنــا لتحميل مكتبة محركات السيرفو لـ ESP32-C3.
ملاحظة مهمة: إذا كنت تستخدم متحكم ESP32 أو ESP8266 ستحتاج إلى تغيير المكتبات في قسم:
// ************************* Servos
لتحميل كود .ino النملة الآلية الزرقاء اضغط هنــا.
يحتوي الكود البرمجي بالفعل على وظيفة التحكم عن بعد (كما هو موضح في الأسطر المحددة في الكود).
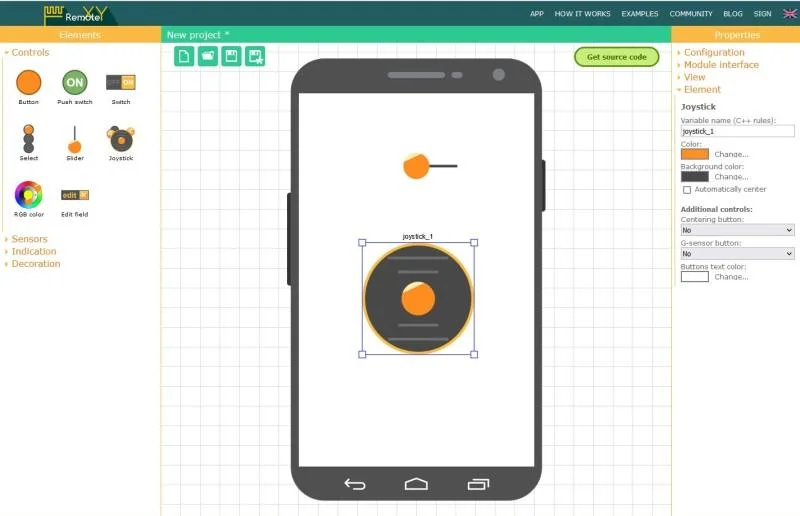
ويمكنك زيارة موقع https://remotexy.com/ لإنشاء واجهة تحكم مخصصة للهاتف الذكي ثم إضافتها إلى برنامج "النملة الآلية الزرقاء"
ولمزيد من المعلومات حول كيفية القيام بذلك، يمكنك الرجوع إلى هذا الدليل التعليمي:
تطبيق الهاتف الذكي متاح عبر الروابط التالية:
لتحميل البرنامج لهواتف الأندرويد اضغط هنــا.
أما بالنسبة لهواتف الأيفون فيمكنك تحميل البرنامج من هنــا.
خطوات التشغيل:

قم بتشغيل النملة الآلية وانتظر بضع لحظات حتى تتم تهيئة النظام.
ثم افتح تطبيق التحكم عن بعد على هاتفك.
استمتع بتجربة التحكم في حركة النملة الآلية عبر واجهة التطبيق.

تسجيل الدخول مطلوب
يجب عليك تسجيل الدخول لإضافة تعليق.
تسجيل الدخول