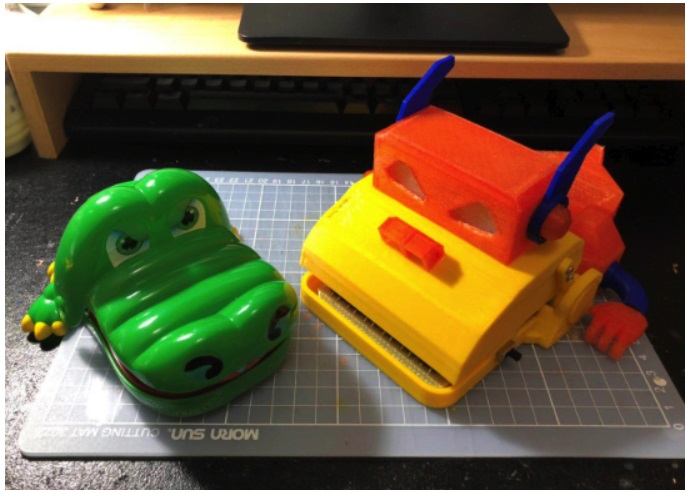
مرحباً بكم في مشروعنا الجديد، اليوم سنصنع روبوت تمساح إلكتروني ممتع مستوحى من اللعبة الكلاسيكية (التمساح العضاض)، لكن هذه المرة سنضيف له لمسة إلكترونية ذكية باستخدام لوحة الأردوينو.
فكرة المشروع:
في اللعبة الأصلية يمتلك التمساح عدة أسنان، وعندما تضغط على السن الخطأ، يقفز التمساح ويغلق فمه فجأة، في نسختنا الإلكترونية سنحول هذه الآلية الميكانيكية إلى نظام إلكتروني ذكي باستخدام أزرار ضغط بدلاً من الأسنان ومحرك سيرفو لتحريك الفك وسوف نضيف مصابيح LED لإضفاء جو من التشويق.
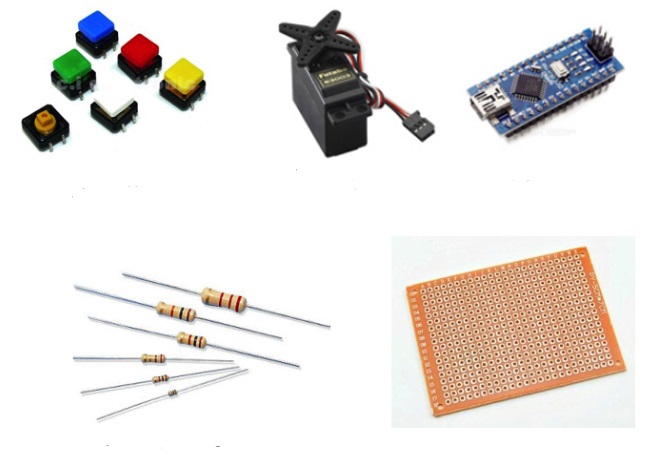
الأجزاء الإلكترونية:
مصادر الطاقة:
أدوات مساعدة:
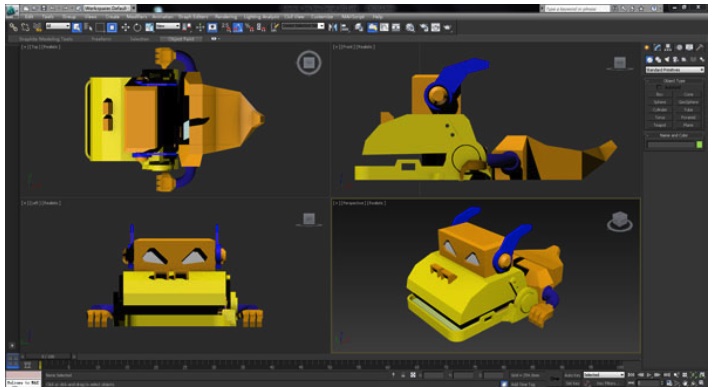
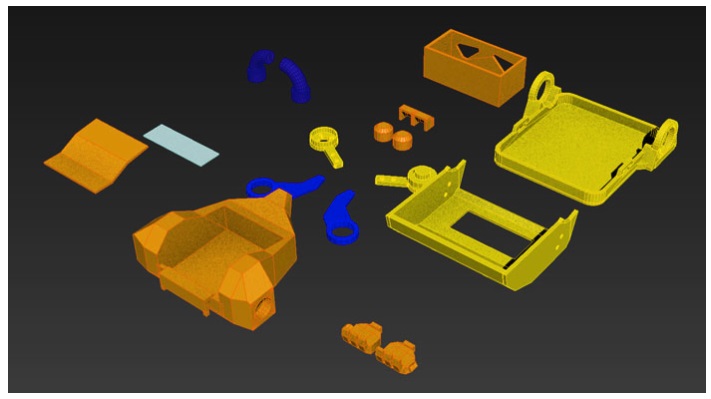
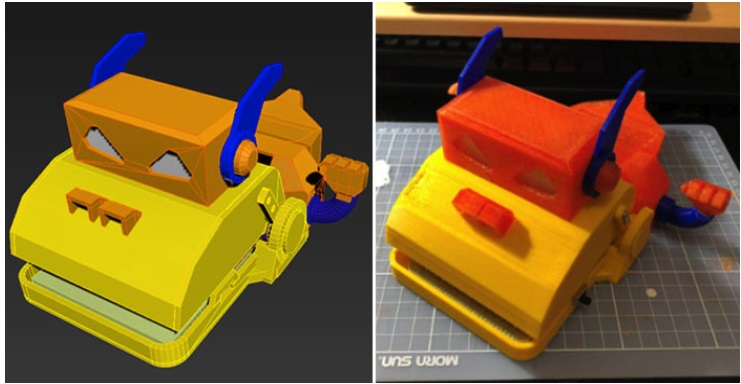
قم بتصميم مظهر روبوت مخيف باستخدام برنامج 3DS MAX، حيث يتكون الروبوت من ثلاثة أجزاء وهم: فك علوي متحرك، وفك سفلي ثابت معظم الوقت، وجسم لحمل البطاريات، كما هو موضح في الصورة أدناه.
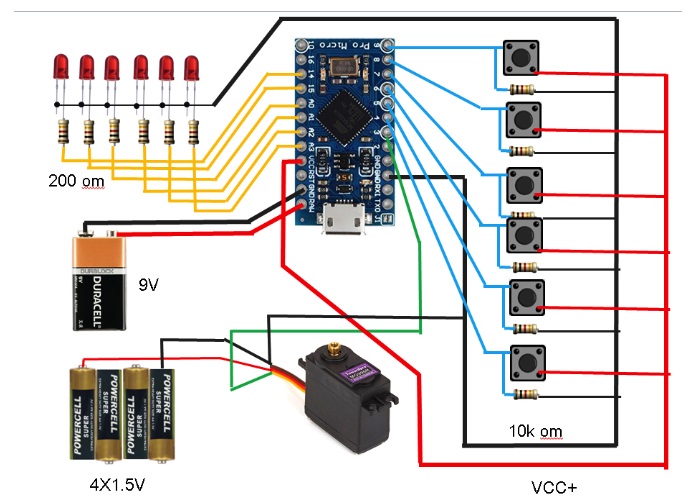
مخطط الدائرة الإلكترونية يكون كما هو موضح في الصورة أدناه، وفي الواقع الأمر ليس معقدًا، حيث نصل الأزرار الستة بدوائر الإدخال في الأردوينو، ثم نربط مصابيح LED مع المقاومات لحمايتها من التلف، وأخيراً نقوم بتوصيل محرك السيرفو ليتحكم في حركة الفك.
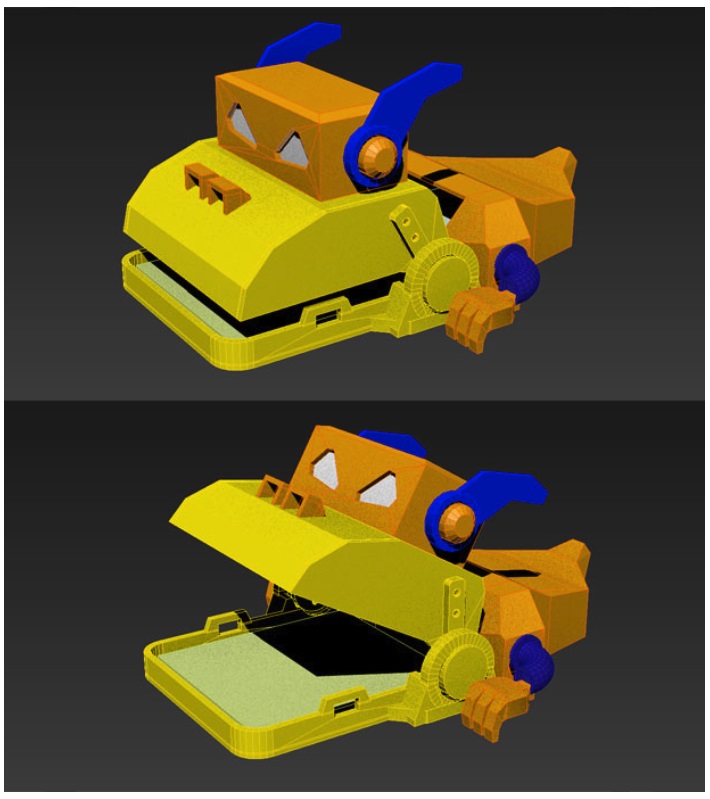
من خلال برنامج 3DS MAX نقوم بترتيب المكونات بألوان مختلفة للطباعة.
افصل بين الألوان المختلفة خاصة الأصفر، الأزرق، البرتقالي، وكمية قليلة من الأبيض (شفاف).
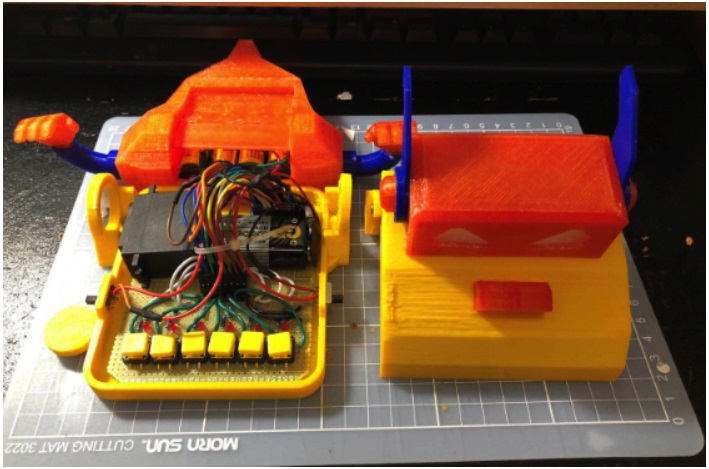
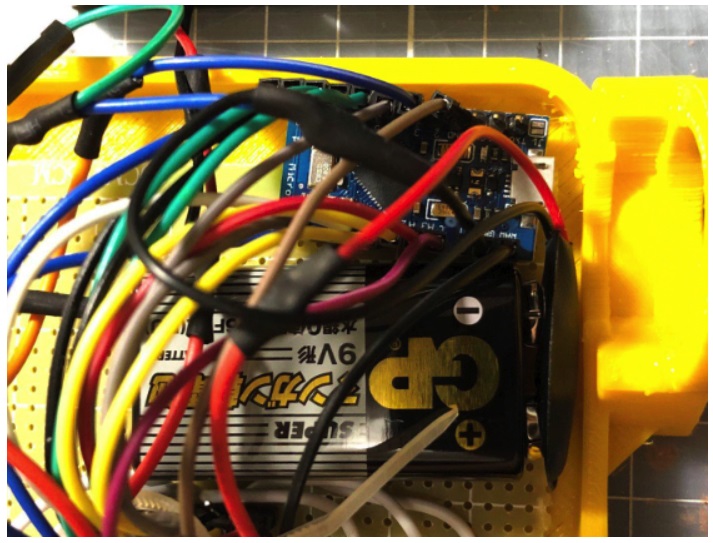
اجعل قسم اللوحة الرئيسية في الجزء السفلي من الروبوت، ثم قم بلحام المكونات الآتية:
بحيث يتم تثبيت المكونات معًا، وتصميم الرأس يتم تثبيته بواسطة غراء الإيبوكسي كما هو موضح في الصورة، كما يتم توصيل الرأس بالجسم بغراء الإيبوكسي.
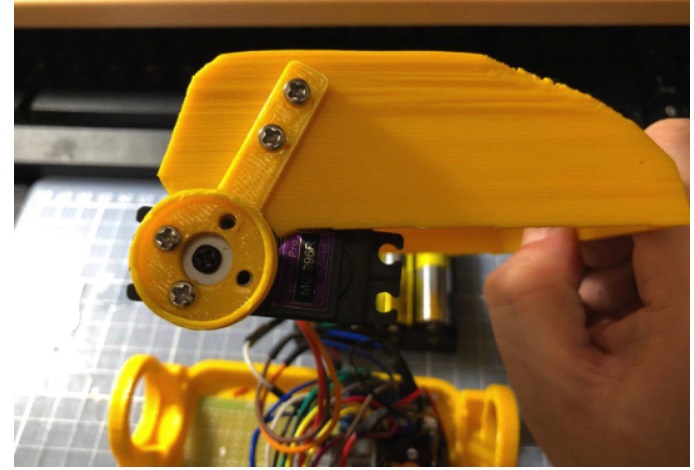
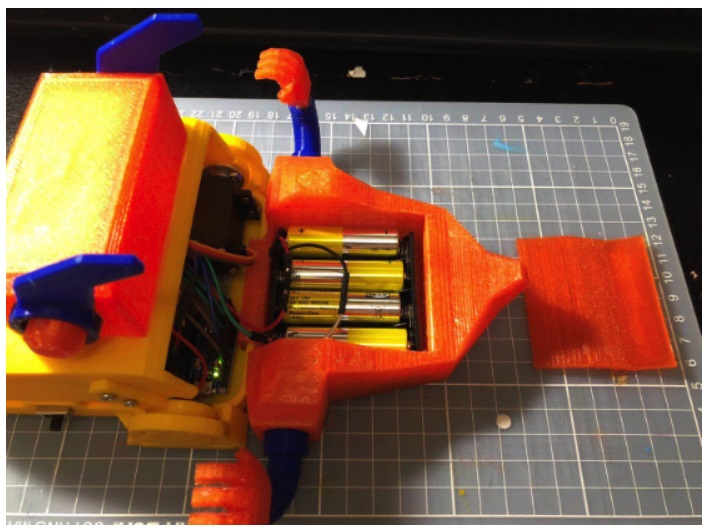
ثم قم بتجميع الأجزاء الميكانيكية الأخرى، حيث يتم توصيل الفك العلوي بقضيب الدوران بمسامير، وتوصيل قضيب دوران الفك العلوي بلوحة دوران السيرفو بواسطة المسامير، ثم يتم وضع محرك السيرفو داخل الجانب الأيسر من الفك السفلي، بينما توضع بطارية 9V ولوحة Arduino في الجانب الأيمن.


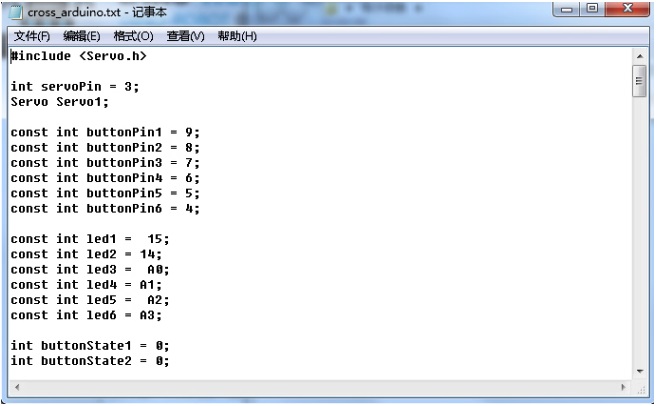
اكتب الكود الخاص بلوحة أردوينو والخاص بمحرك السيرفو كما هو موضح في الصورة.
حيث أن كود البرمجة سهل ويتبع الخطوات التالية:
اختبر الجهاز عن طريق تشغيل المفتاح ليدخل في وضع الاستعداد، ثم اضغط على الزر الأول لبدء البرنامج.
يختار البرنامج رقمًا عشوائيًا، وفي كل مرة يضغط اللاعب على زر، سيتم إطفاء مؤشر LED الأحمر المقابل، وإذا ضغط اللاعب على الزر الذي يحمل الرقم العشوائي سيقوم التمساح بإغلاق فمه، ويخسر اللاعب، ثم اضغط على الزر الأول مرة أخرى لإعادة التشغيل.
وأخيراً فإن هذا المشروع ممتع وسهل التنفيذ، وهو مناسب للمبتدئين في عالم الإلكترونيات والروبوتات، يمكنك تطويره بإضافة أصوات أو جعل التمساح يحرك عينيه.
فهل أنت مستعد لصنع تمساحك الإلكتروني؟ جرّب المشروع وشاركنا تجربتك.
تسجيل الدخول مطلوب
يجب عليك تسجيل الدخول لإضافة تعليق.
تسجيل الدخول