
مرحبًا بالجميع، في هذا المشروع سأشرح طريقة عمل صندوق القمامة الآلي، حيث يعمل هذا المشروع على فتح غطاء صندوق القمامة تلقائيًا عند اقتراب يدك منه، ويغلقه عند ابتعادك عنه، فإن الأمر بسيط جدًا، فهو إنه مشروع سهل لكنه ممتع وسيجعلك ترغب في تنفيذه بنفسك، والآن بعد أن تعرفت على فكرة المشروع دعنا ننتقل إلى المواد اللازمة لبناء هذا المشروع البسيط والممتع.
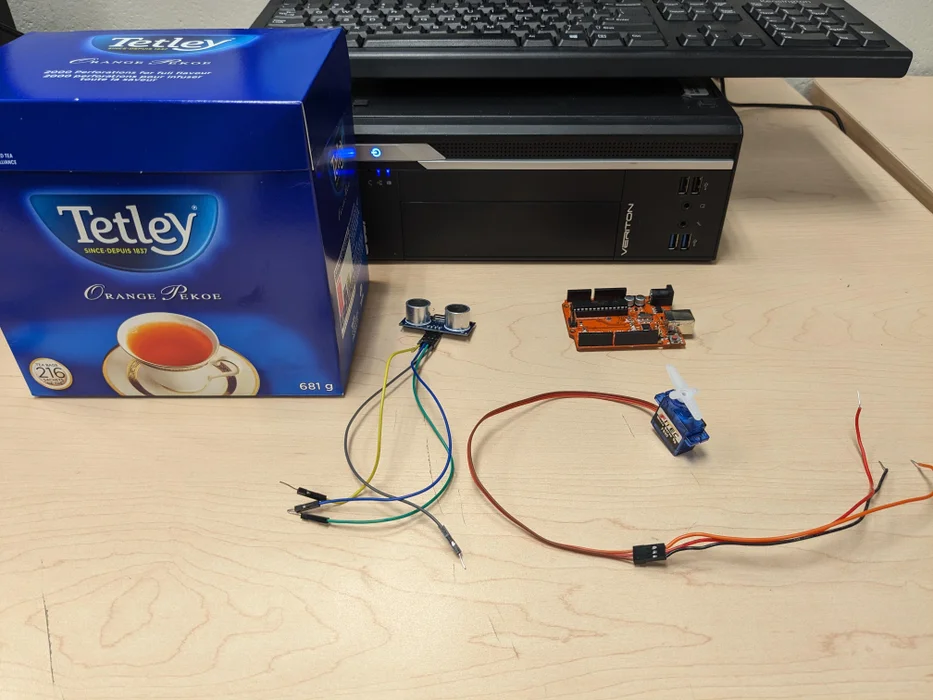
لتنفيذ هذا المشروع ستحتاج إلى المواد التالية:
والآن بعد أن تعرفت على المواد، دعنا ننتقل إلى طريقة تجهيز كل شيء، ولنبدأ بالخطوة الأولى.
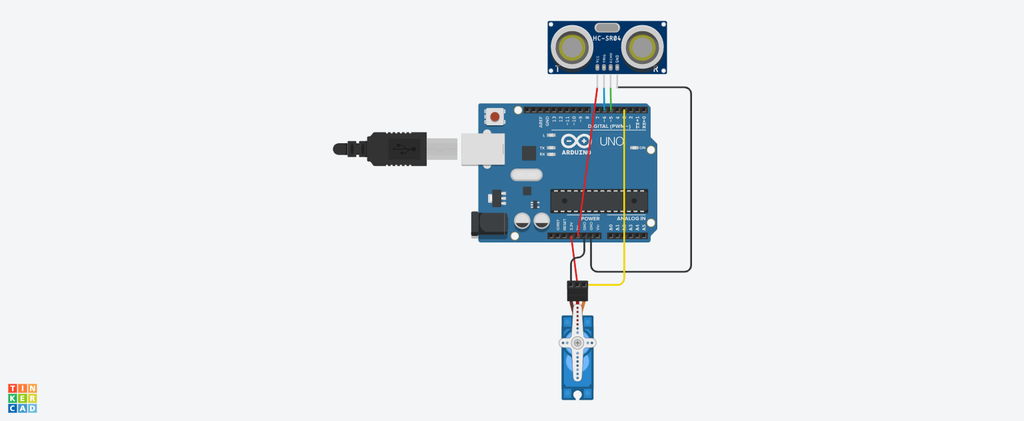
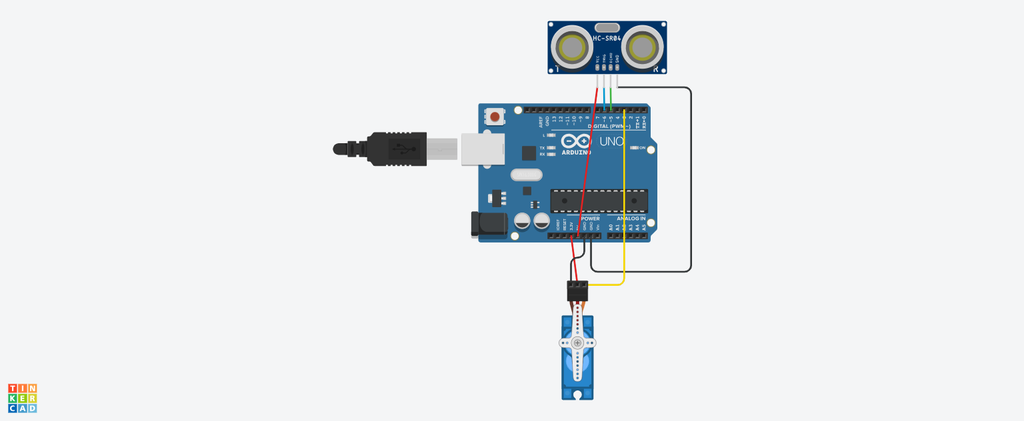
يمكنك استخدام Tinkercad لمساعدتك إذا واجهتك صعوبة في توصيل محرك السيرفو ومستشعر المسافة بالأردوينو.
هذا هو المكون الوحيد الذي ستحتاج فيه لأسلاك التوصيل لأن أطراف حساس المسافة مصممة لكي تكون مناسبة للوحة التجارب (Breadboard)، فكل ما عليك فعله هو توصيل الأسلاك بحساس المسافة، حيث يتم توصيل السلك الأول بـ VCC والثاني بـ GND، ثم قم بتوصيل السلكين الآخرين بـ Trig و Echo.
هنا ستحتاج إلى أسلاك لمحرك السيرفو، حيث يحتوي على 3 فتحات لتوصيل 3 أسلاك (يفضل استخدام أسلاك ملونة لمعرفة مكان كل سلك إذا أردت نزعها لاحقًا).
الآن بعد أن أصبح كلا المكونين مزودين بالأسلاك، سنقوم بتوصيلهما بالأردوينو، وبالنسبة لحساس المسافة نقوم بتوصيل VCC بـ 5V وGND بـ دبوس GND، بعد ذلك يمكنك توصيل trig وecho بأي دبوس رقمي تريده، لكن تذكر فقط تغييره في الكود، وينطبق نفس الشيء على المحرك.
أما بالنسبة لمحرك السيرفو فلدينا ثلاثة أسلاك: أحمر وبرتقالي وبني، السلك الأحمر يتصل بـ 3.3V، والبني يتصل بـ GND، والبرتقالي يتصل بأي دبوس رقمي تريده.
الآن يجب أن يكون كل شيء موصولاً بالأردوينو، فلننتقل إلى الخطوة التالية.
أولًا قم بقص فتحات تناسب حجم حساس المسافة، حيث ستضع الحساس فيها (تأكد من أن الحساس يناسب الفتحات).
كل ما عليك هنا هو إدخال حساس المسافة في الفتحات التي صنعتها.
هنا يجب أن تحدد المكان المناسب لتثبيت محرك السيرفو، بحيث يدفع الغطاء لأعلى عند الفتح ويغلقه عند الانتهاء، ويفضل استخدام ملحق السيرفو (Servo Arm) لجعل المحرك أطول، مما يسهل عملية رفع الغطاء.
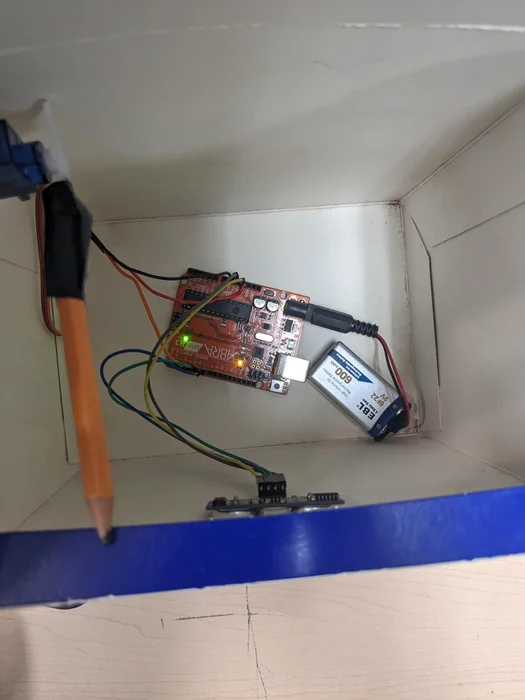
هذه الخطوة اختيارية وأنا لم أقم بها، لكن إذا كنت تريد صندوق قمامة أكثر تنظيمًا، فيمكنك تثبيت الأردوينو والبطارية بأحد الجوانب.
ويفضل استخدام صندوق كرتوني أكبر أو قم بصنع واحد بنفسك، لأن الصندوق الذي استخدمته كان صغيراً ومخصص لهذا المشروع فقط، لكن يمكن للكثيرين تحويله إلى صندوق قمامة حقيقي.
والآن ننتقل إلى الخطوة الأخيرة، وهي الكود.
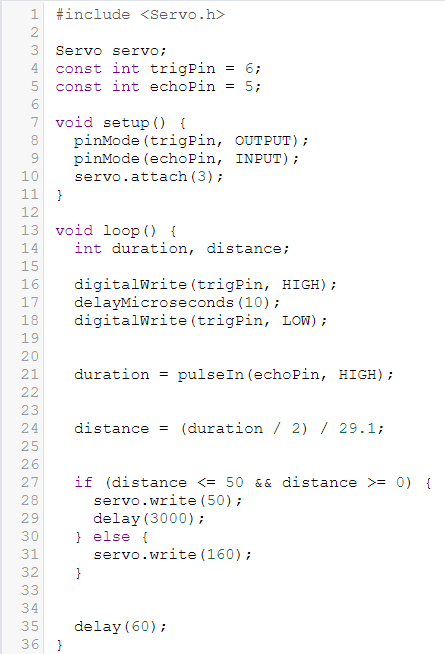
يجعل trigPin كإخراج (Output) و echoPin كإدخال (Input).
يربط محرك السيرفو بالدبوس 3 (يمكن تغييره إذا كنت تستخدم دبوسًا آخر).
يرسل إشارة إلى trigPin لتفعيل حساس المسافة.
يقيس مدة استجابة الإشارة من echoPin.
يحسب المسافة بناءً على مدة الإشارة.
إذا كانت المسافة أقل من 50 سم يحرك السيرفو إلى 50 درجة (يفتح الغطاء)، وإلا يحركه إلى 160 درجة (يغلق الغطاء).
يضيف تأخيرًا قصيرًا قبل تكرار الحلقة.
المرفقات:
لتحميل الكود اضغط هنــا مباشرة.
تسجيل الدخول مطلوب
يجب عليك تسجيل الدخول لإضافة تعليق.
تسجيل الدخول