
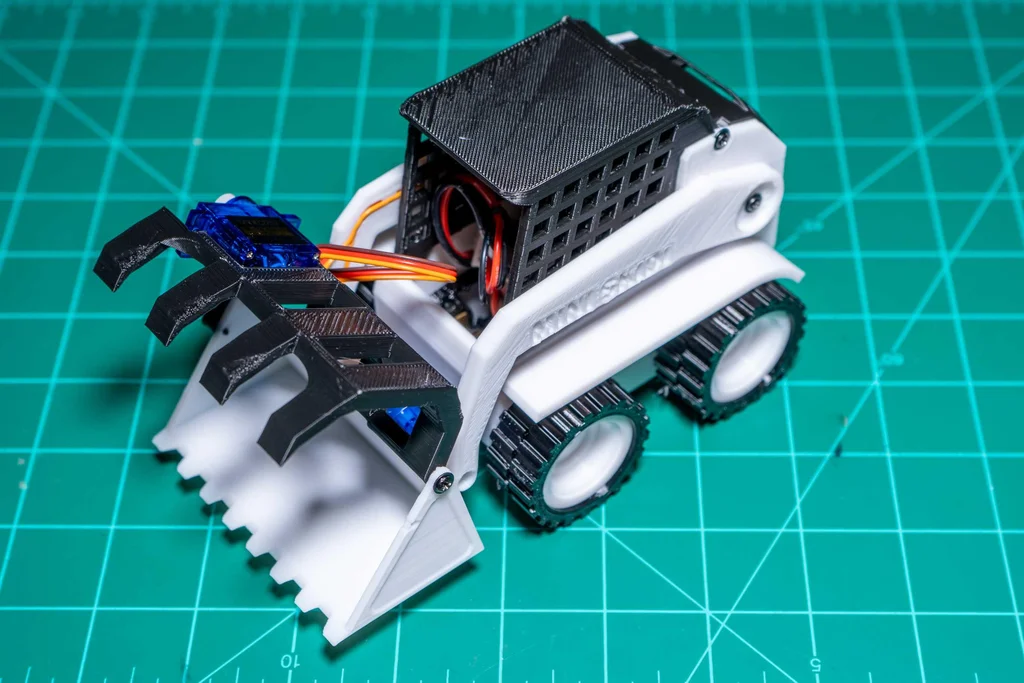
لطالما كان لدي شغف خاص بالجرافات الإنزلاقية وبالسيارات الصغيرة التي تعمل بالتحكم عن بُعد، لذلك كان الجمع بين هذين العالمين أمرًا طبيعيًا وممتعًا بالنسبة لي، وبفضل الإمكانيات الكبيرة التي توفرها الطباعة ثلاثية الأبعاد ولوحات التطوير الحديثة مثل ESP32، تمكنت من تنفيذ مشروع مسلٍ للغاية، كما يُعد منصة تعليمية ممتازة لاكتساب خبرة عملية في مجال الروبوتات والأنظمة المدمجة.
الأطقم المتوفرة
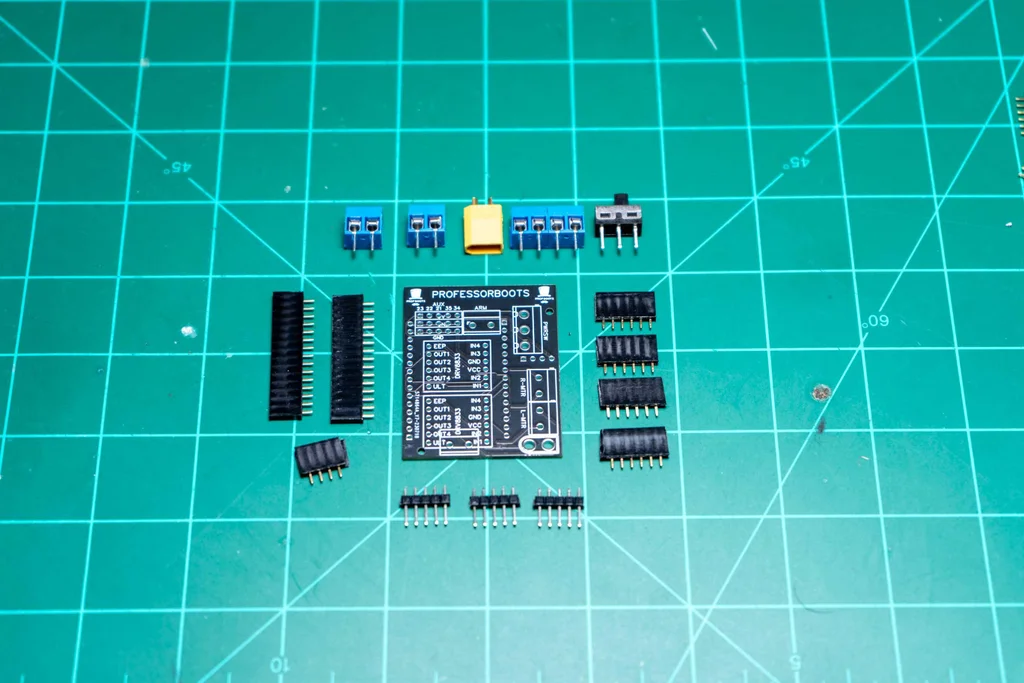
المكونات الفردية
يعتمد هذا المشروع على لوحة PCB مخصصة قمت بتصميمها خصيصًا، ويمكن العثور على ملفات Gerber الخاصة باللوحة، بالإضافة إلى كود ESP32، عبر مستودع GitHub من هنـــا.
كما يمكنك تحميل ملفات الطباعة ثلاثية الأبعاد من هنـــا.
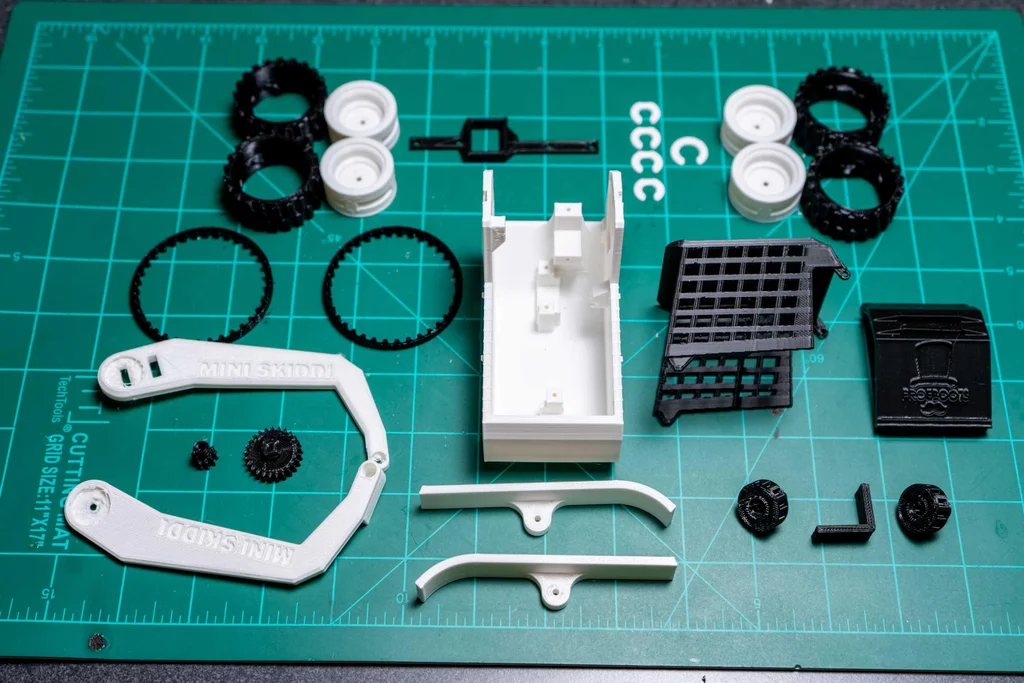
نصائح الطباعة ثلاثية الأبعاد
يتم تصنيع الإطارات والسيور باستخدام مادة TPU من شركة SainSmart.
يتم طباعة جميع الأجزاء بنسبة تعبئة 25٪ وبسماكة جدران 1.2 مم مع فوهة طباعة بقطر 0.4 مم، باستثناء محاور القيادة التي يجب طباعتها بنسبة تعبئة 100٪ باستخدام أقوى مادة متوفرة لديك.
الأدوات المطلوبة للتجميع
في حال التجميع باستخدام طقم جاهز:
في حال التصنيع من الصفر أو باستخدام طقم الإلكترونيات فقط، ستحتاج إلى مكواة لحام.
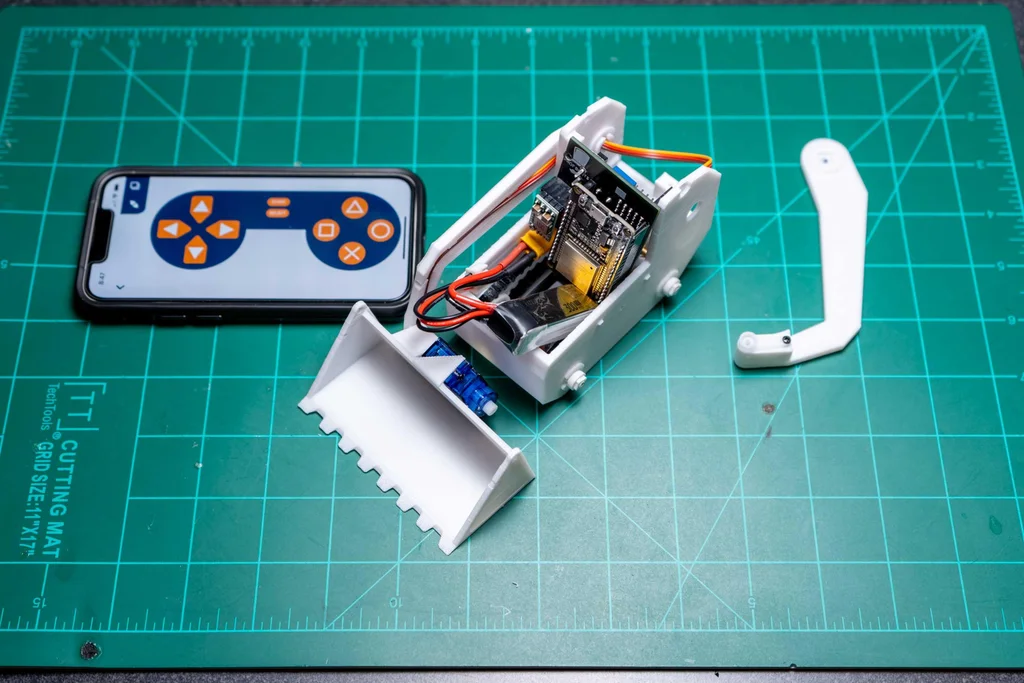
نظرًا لوجود شكاوى من عدد من المستخدمين حول تطبيق Dabble الذي كان يُستخدم سابقًا للتحكم في MiniSkidi، قمت بكتابة برنامج ثابت جديد يولد صفحة تحكم تعمل عبر المتصفح، ويمكن الوصول إليها من أي جهاز يدعم تصفح الإنترنت.
جميع وحدات MiniSkidi التي تم شحنها بعد تاريخ 15 أغسطس تحتوي بالفعل على هذا البرنامج، وفي حال عدم توفره يمكنك تحميله من مستودع GitHub المشار إليه أعلاه، وللتأكد مما إذا كان البرنامج مثبتًا، قم بتشغيل MiniSkidi أو توصيل لوحة ESP32 عبر USB، ثم انتقل إلى إعدادات WiFi، إذا ظهر اسم الشبكة Profboots MiniSkidi فهذا يعني أن البرنامج الجديد مثبت، أما في حال عدم ظهوره فهذا يعني أن برنامج Dabble لا يزال مستخدمًا، ويمكنك الاستمرار به إن رغبت، أو متابعة الخطوات التالية لتثبيت وحدة التحكم عبر المتصفح.
الاتصال بـ MiniSkidi
قم بالاتصال بشبكة WiFi المسماة "Profboots MiniSkidi --"، ثم افتح متصفح الإنترنت المفضل لديك، وأدخل عنوان IP الافتراضي للوحة ESP32 وهو 192.168.4.1.
ستظهر واجهة التحكم الخاصة بـ MiniSkidi على الشاشة، ويُستخدم خيار "HorizontalScreen" لقفل الهاتف في الوضع العمودي مع إمساكه بشكل أفقي، حيث يتم إعادة توجيه عناصر التحكم لتتناسب مع هذا الوضع، على سبيل المثال الاتجاه الذي كان للأمام يصبح يمينًا ويسارًا، والعكس صحيح.
في حال انقطع الاتصال مؤقتًا أو تم إطفاء الهاتف، يجب تحديث الصفحة لإعادة تفعيل عناصر التحكم.
تثبيت البرنامج الثابت الجديد
للحصول على البرنامج الجديد يرجى الرجوع إلى مستودع GitHub الخاص بـ Mo Betta Firmware.
قم بإعداد بيئة Arduino IDE لتحميل البرنامج على وحدة ESP32.
بعد الانتهاء من الخطوات السابقة، انتقل إلى Tools > Board > ESP32 Arduino ثم اختر ESP32 DEV Module كوحدة العمل الخاصة بك.
سواء قمت بطلب الطقم الكامل أو بطباعة الأجزاء بنفسك، تأكد من إزالة أي بقايا دعامات طباعة زائدة من جميع القطع.
في حال طلبك للطقم الكامل يمكنك تخطي هذه الخطوة، أما إذا كنت تستخدم طقم الإلكترونيات فقط فتابع ما يلي:
1- ابدأ بلحام رؤوس التوصيل الذكرية في الموضع المسمى AUX، الصف السفلي هو الأرضي، والصف الأوسط هو 5 فولت، والصف العلوي هو إشارة التحكم المتصلة بمخارج ESP32، وسيتم استخدام هذه المنافذ مع سيرفو إمالة الدلو، وكذلك مع أي إضافات مستقبلية مثل ملحق المخلب الخاص بالجرافة.
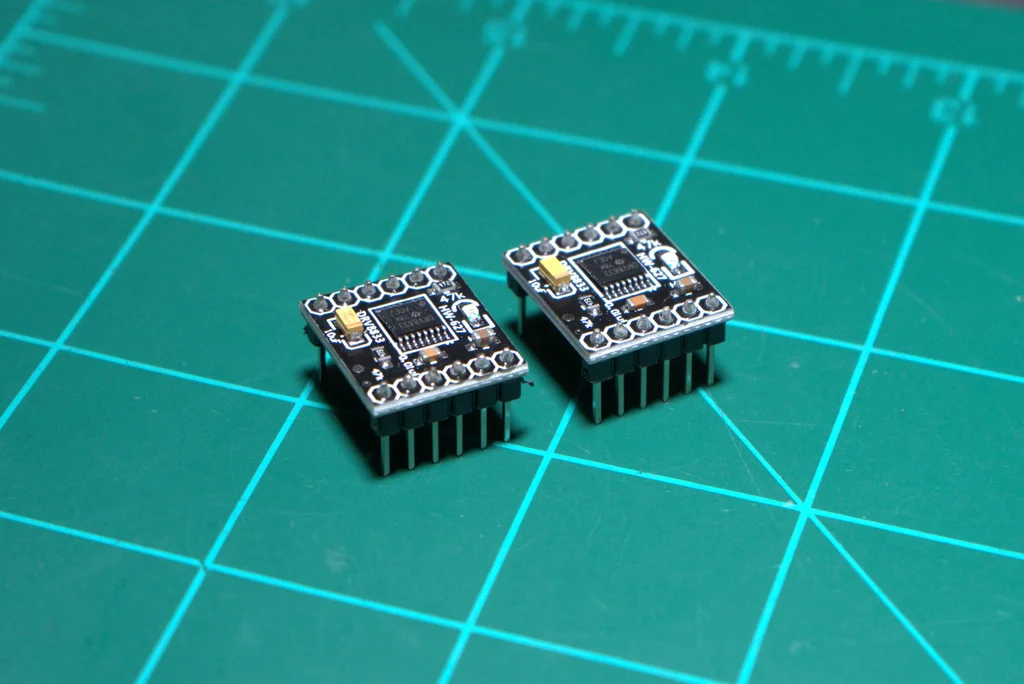
2- قم بتقسيم أحد رؤوس التوصيل الأنثوية إلى أربع مجموعات مكونة من 6 دبابيس، وستُستخدم هذه الرؤوس مع دوائر H-Bridge المسؤولة عن التحكم في محركات N20، حيث تتيح استخدام مصدر جهد خارجي لتجنب سحب تيار عالٍ من ESP32، كما تسمح بعكس اتجاه دوران المحركات حسب الإشارة القادمة من اللوحة.
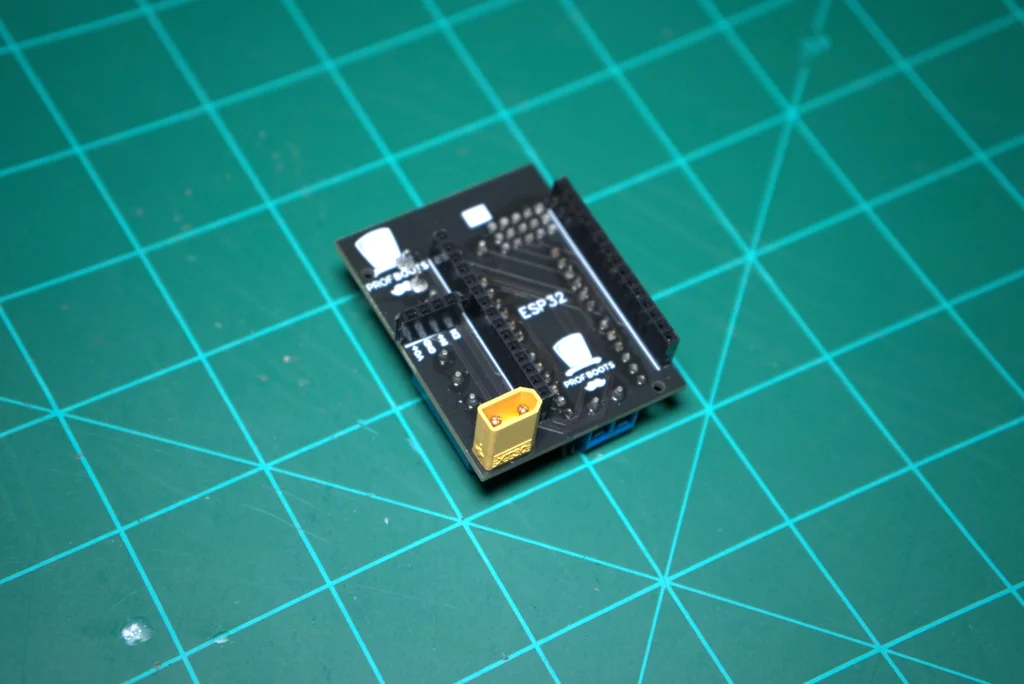
3- قم بتقسيم صفين من رؤوس التوصيل الأنثوية بطول 15 دبوسًا، وستُستخدم لتثبيت لوحة ESP32 التي تُعد العقل الرئيسي للمشروع.
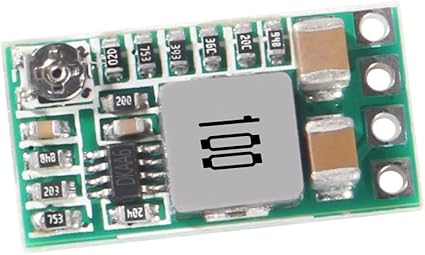
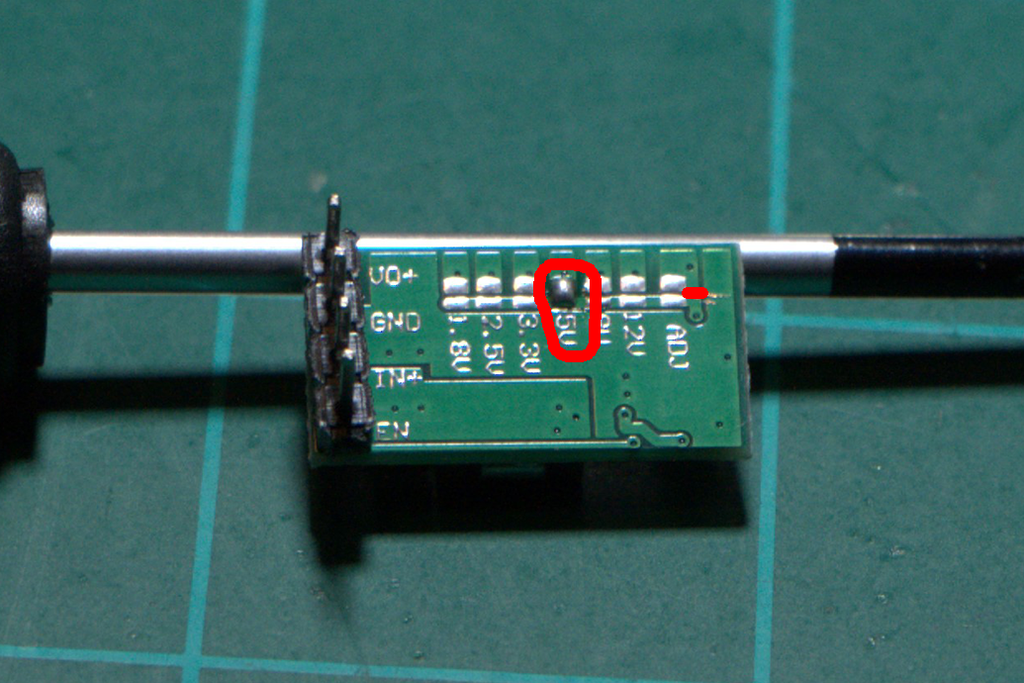
4- قم بتقسيم صف أخير من رؤوس التوصيل الأنثوية بطول 4 دبابيس، وسيُستخدم مع محول خفض الجهد Buck Converter، حيث يعمل هذا المحول على تقليل الجهد بكفاءة، فمثلًا يعمل المشروع ببطارية 2S ليثيوم بجهد 7.4 فولت، بينما تعمل المحركات والسيرفو بجهد يتراوح بين 5 و6 فولت، وهنا يأتي دور المحول.
5- بعد ذلك قم بلحام جميع المكونات في أماكنها الصحيحة، ويُفضل ترك لحام دبابيس ESP32 للنهاية.
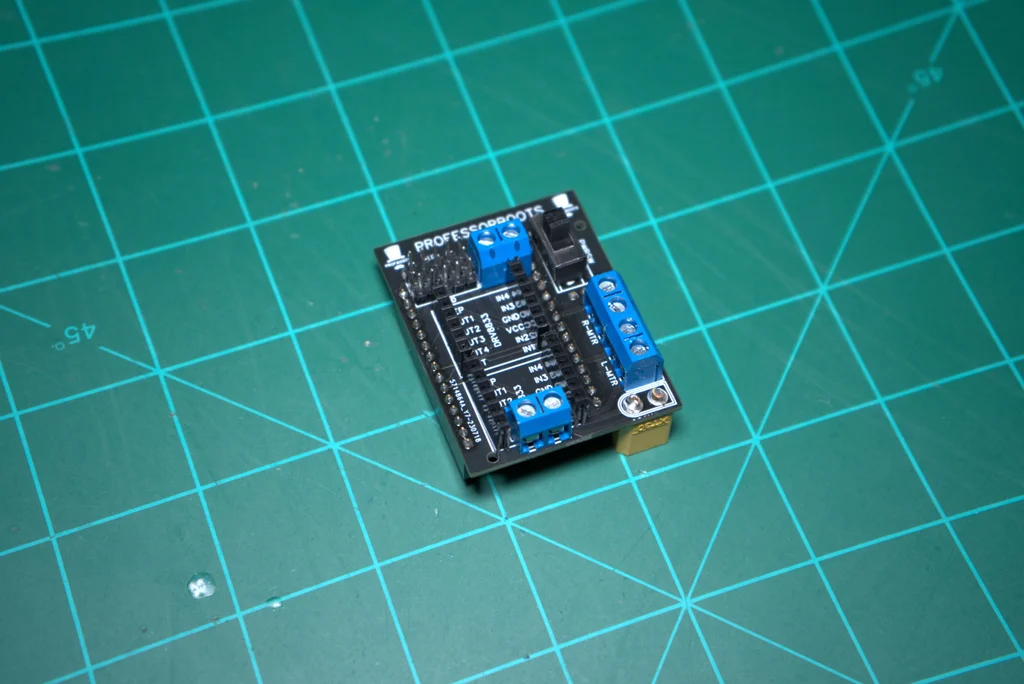
6- قم بلحام أربعة أطراف لولبية زرقاء كما هو موضح، الطرف العلوي مواجه للأعلى، والسفلي للأسفل، والجانب الأيمن باتجاه دبابيس H-Bridge.
7- قم بلحام مفتاح التشغيل، مع الانتباه إلى أن الفتحة العلوية لا تتصل بأي مسار، حيث يكون المفتاح في وضع الإيقاف عند رفعه.
8- تجاهل مسار XT30 المطبوع على اللوحة، وقم بلحام موصل XT30 على نفس جهة دبابيس ESP32، مع التأكد من أن الجانب المربع للموصل متجه إلى الخارج، وهذه خطوة بالغة الأهمية لأن عكس الاتجاه قد يؤدي إلى تلف الدائرة.
9- في حال لم يكن محول Buck Converter يحتوي على دبابيس مثبتة مسبقًا، قم بلحام أربعة دبابيس ذكر، ثم قم بلحام وسادات 5 فولت معًا، وبعد ذلك استخدم سكينًا صغيرًا أو أداة حادة لقطع المسار العلوي كما هو موضح في الصورة، وذلك لإزالة المقاومة المتغيرة من الدائرة.
10- قم بلحام الدبابيس الخاصة بدوائر H-Bridge.
مبروك، أصبحت لوحة MiniSkidi جاهزة للعمل، وحان الآن وقت الجزء الممتع وهو التجميع.
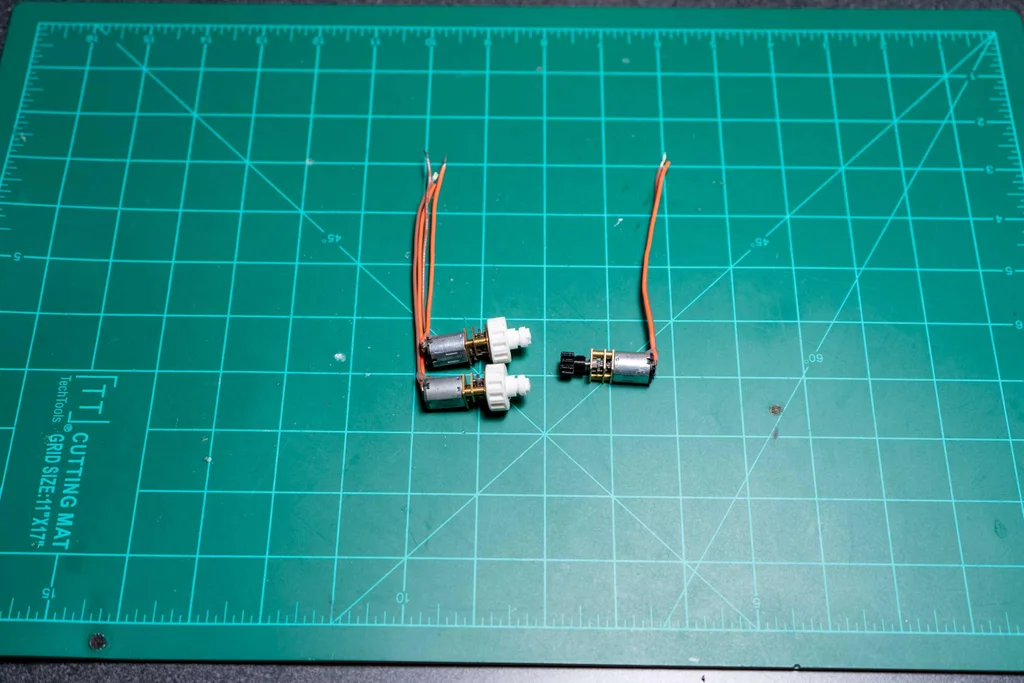
إذا قمت بطباعة الأجزاء بنفسك، ابدأ بتركيب اثنين من محاور القيادة وتروس الذراع على محركات N20، ويُفضل استخدام منجلة أو طرقها بلطف بمطرقة، وإن لم يتوفر ذلك يمكن استخدام حجر متوسط الحجم.
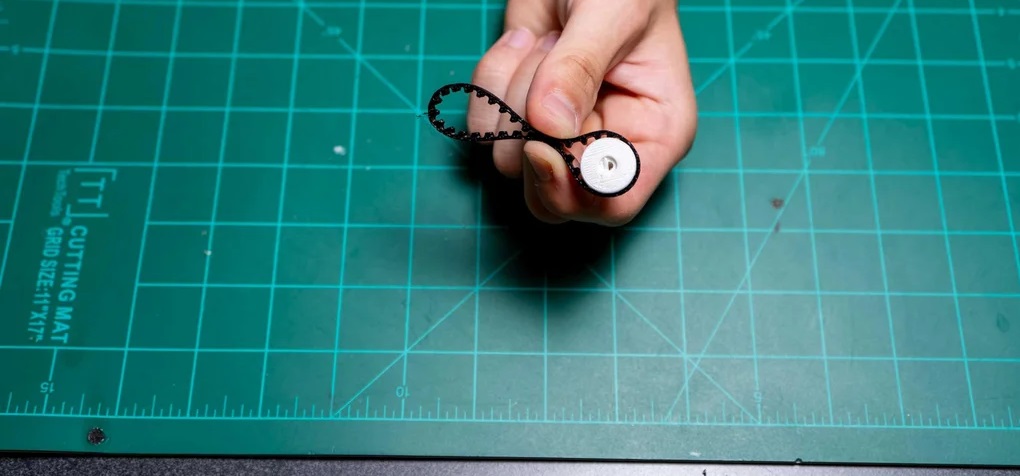
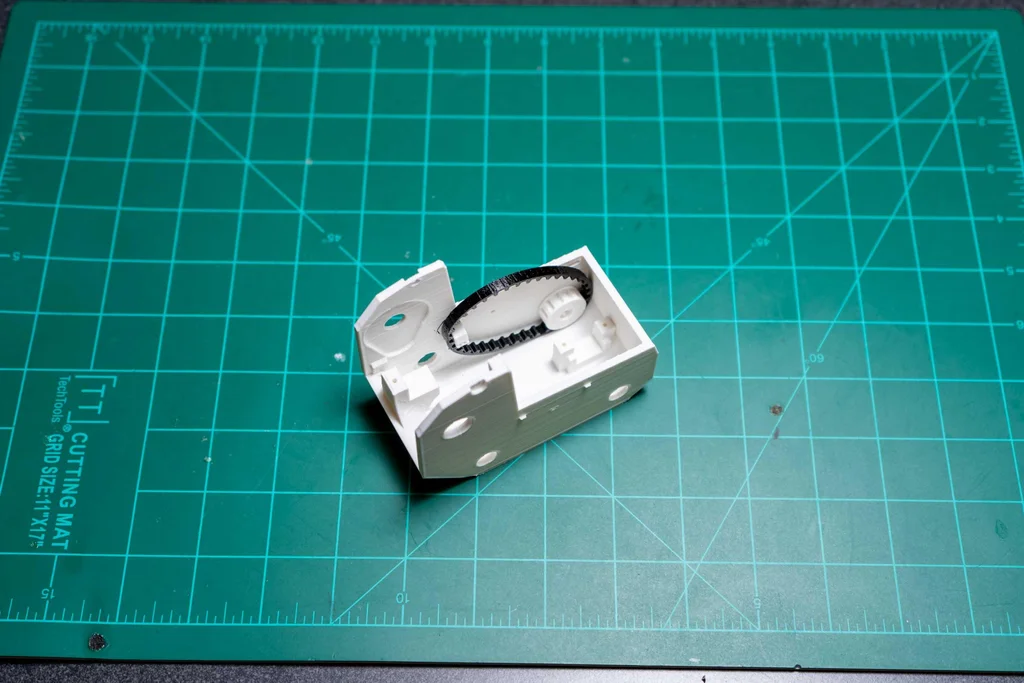
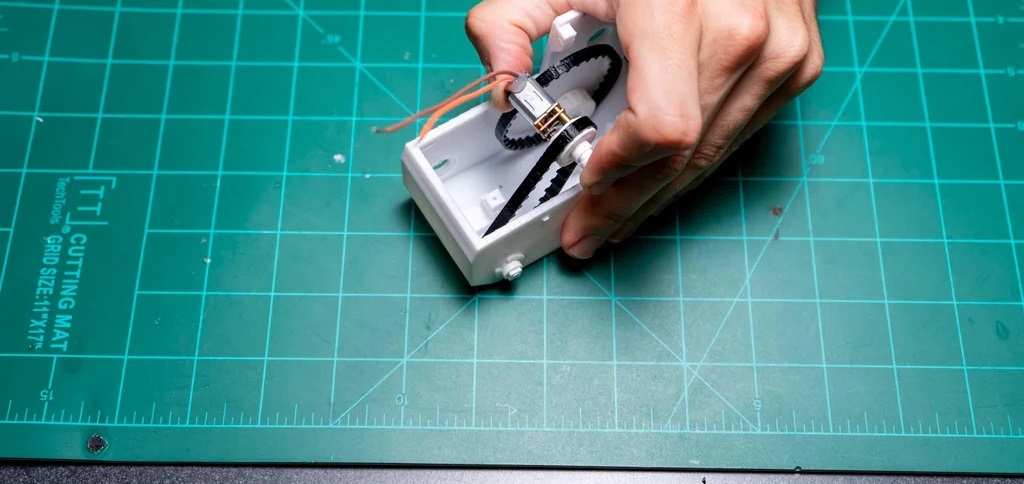
1- باستخدام سير TPU المرن، قم بلفه حول أحد المحاور التي لا تحتوي على محرك، ثم أثناء شد السير أدخله في فتحة المحور الأمامي الأيسر، وبعد ذلك استخدم أحد مشابك C لتثبيت المحور في مكانه، وكرر نفس الخطوات مع المحور الخلفي الأيمن.
2- باستخدام محرك N20 ذو الأسلاك الأقصر، قم بشد السير الأيسر ومرره حول دعامة لوحة PCB باتجاه فتحة المحور الخلفي الأيسر، ثم كرر العملية مع المحور الأمامي الأيمن باستخدام محرك N20 ذو الأسلاك الأطول، وبعد الانتهاء ثبت المحاور باستخدام مشابك C.
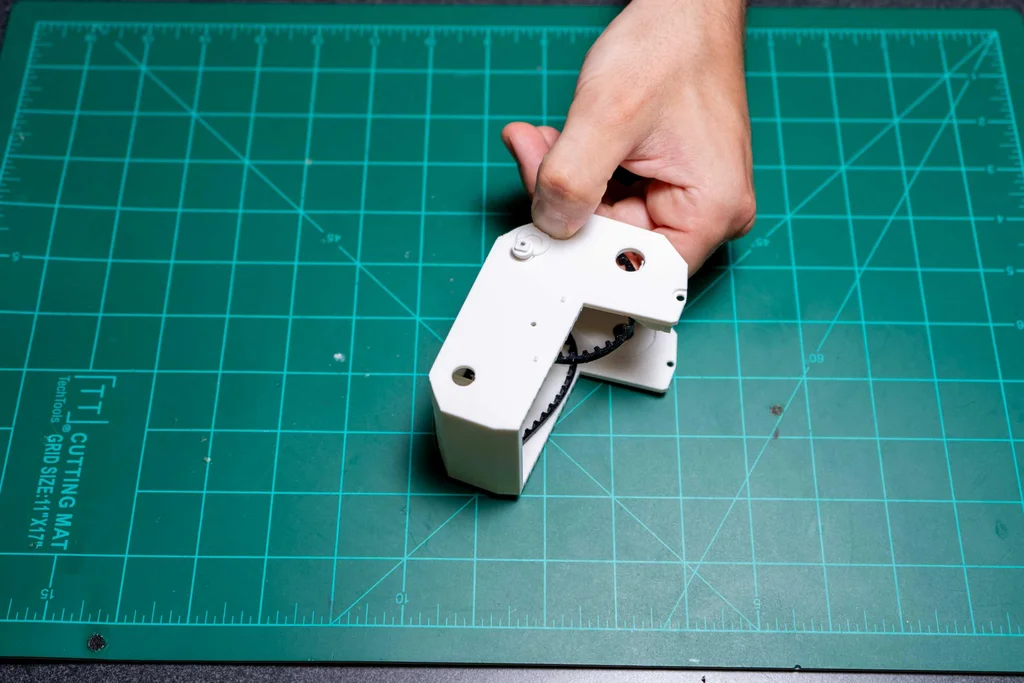
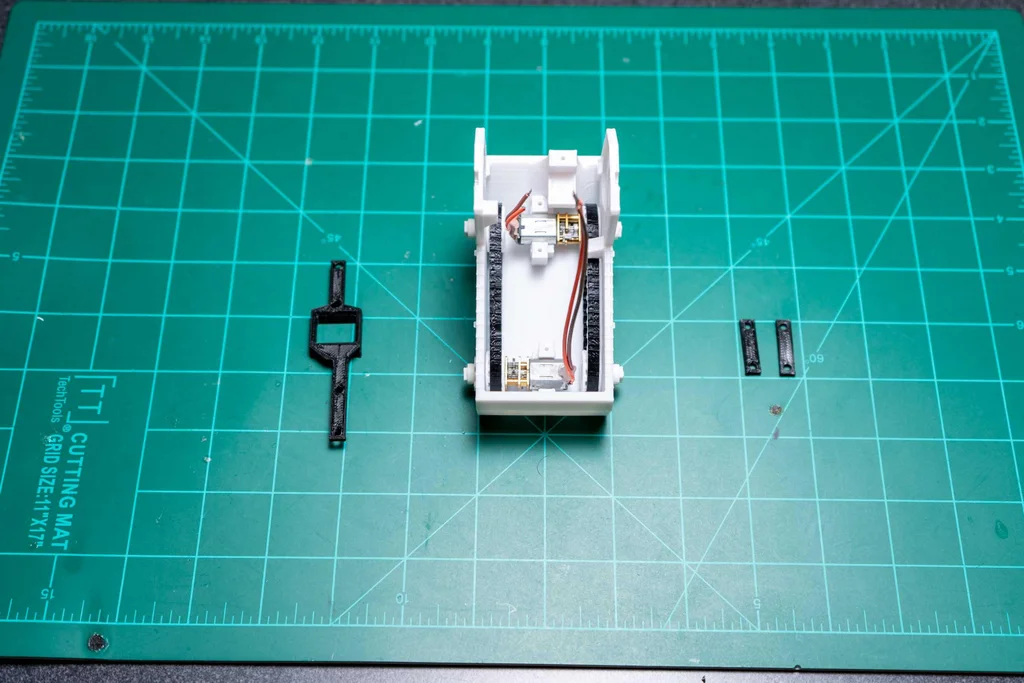
3- لتثبيت المحركات بشكل أفضل، استخدم أحد تصميمي دعامة المحركات، الأول يحتوي على حامل بطارية مدمج ومخصص لبطارية Tattu بسعة 300 مللي أمبير وجهد 7.4 فولت، مع التأكد من أن حامل البطارية متدلي أسفل الدعامة، أما التصميم الآخر فهو مخصص لتثبيت المحركات فقط في حال استخدام بطارية مختلفة، ويتم التثبيت باستخدام مسامير 2.6×6 من نوع رأس ترس Truss، وهي المسامير الأصغر في الطقم.
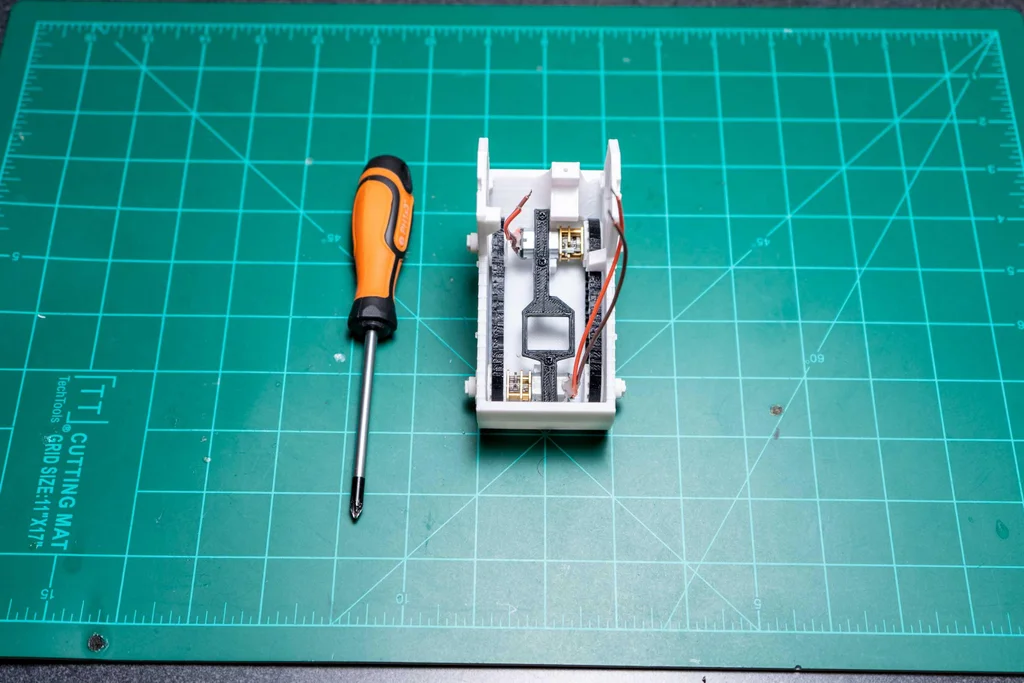
قم بوضع محرك N20 المزود بترس Pinion على دعامة محرك الذراع كما هو موضح في الشكل 4.1، يجب التأكد من أن غلاف الترس النحاسي لا يتجاوز حافة الدعامة إطلاقًا، مع التأكد في الوقت نفسه من أن جهة الترس مضغوطة بإحكام باتجاه الهيكل الرئيسي للمحرك، بعد ذلك استخدم قطعة تثبيت محرك الذراع لقفل المحرك في مكانه باستخدام مسامير 2.6×6 من نوع Truss، وهي المسامير الصغيرة الموجودة في الطقم، وقد تكون من نوع رأس بان (Panhead) بدلًا من Truss في بعض الأطقم.
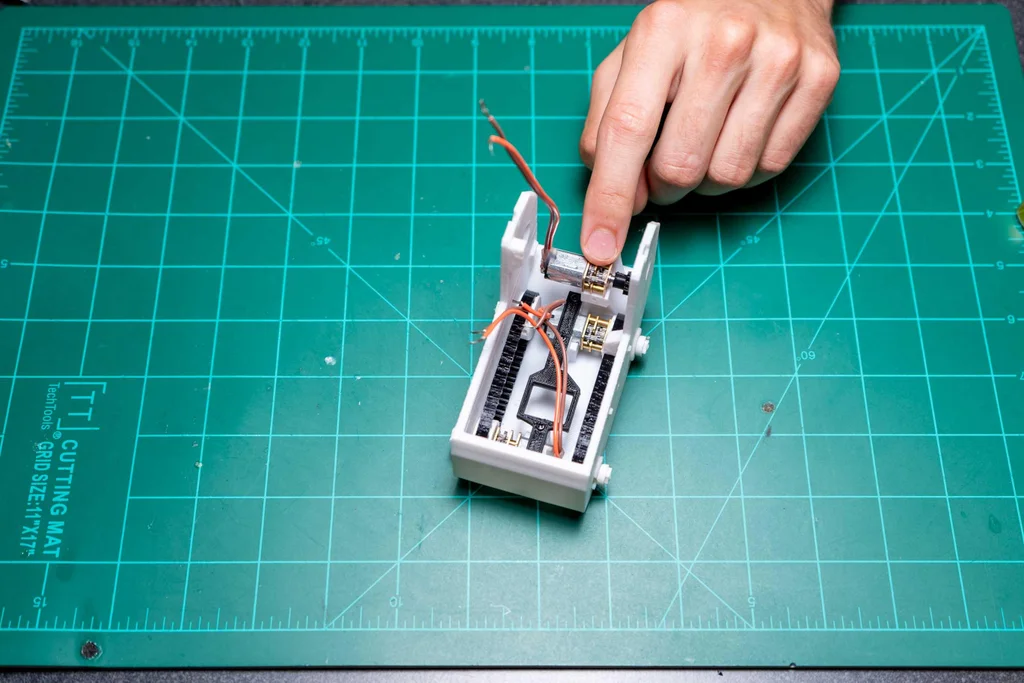
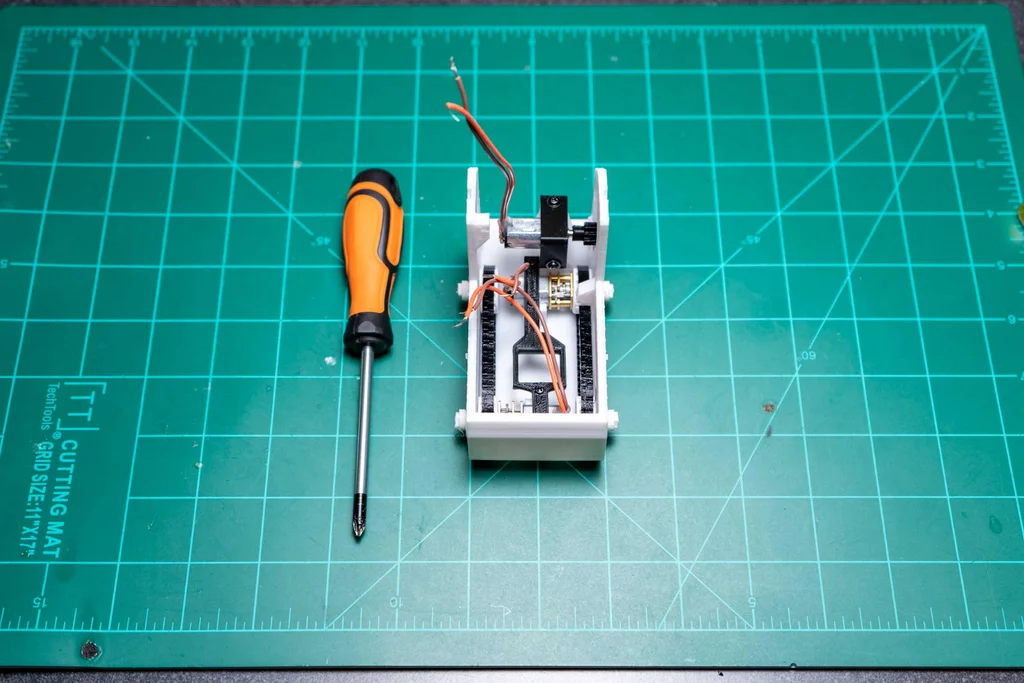
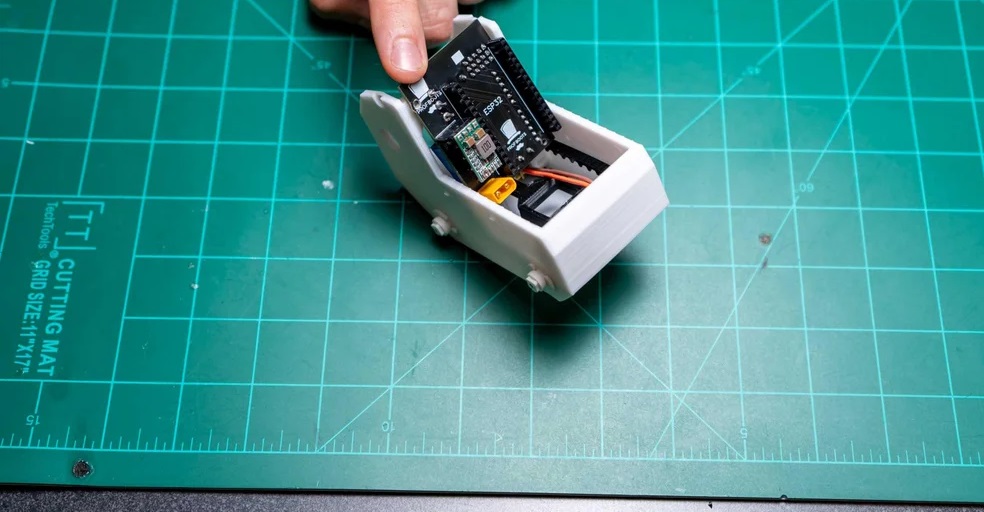
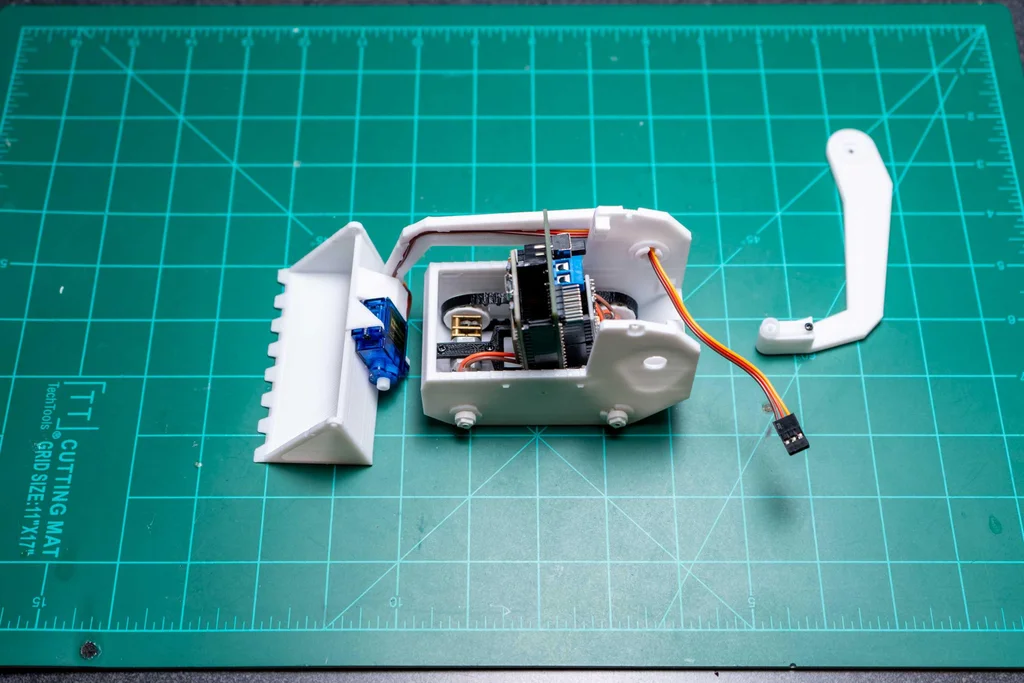
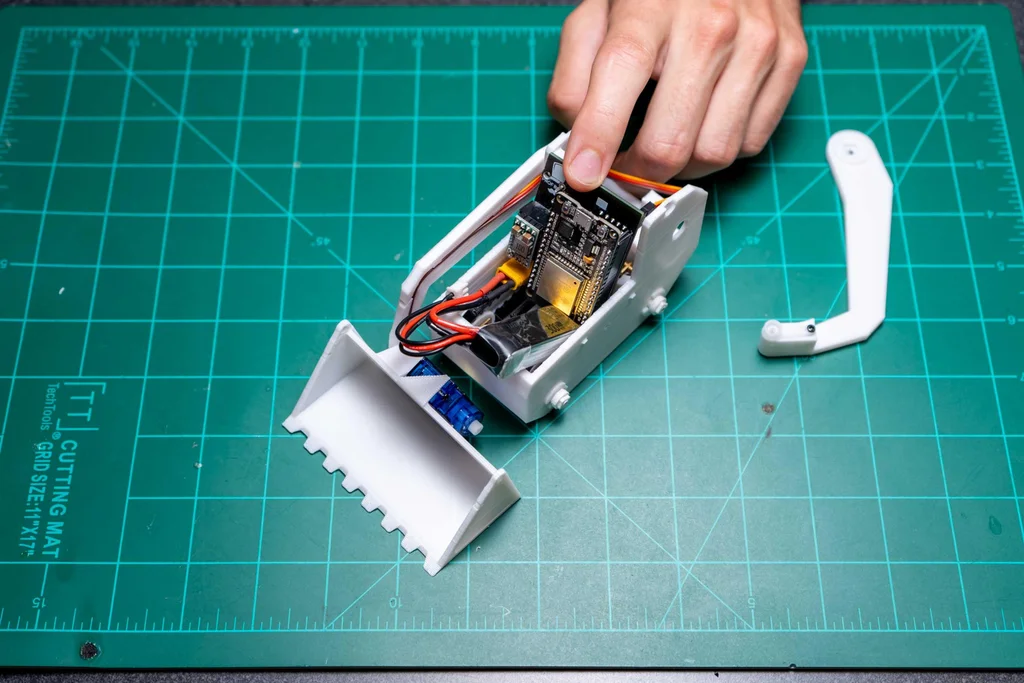
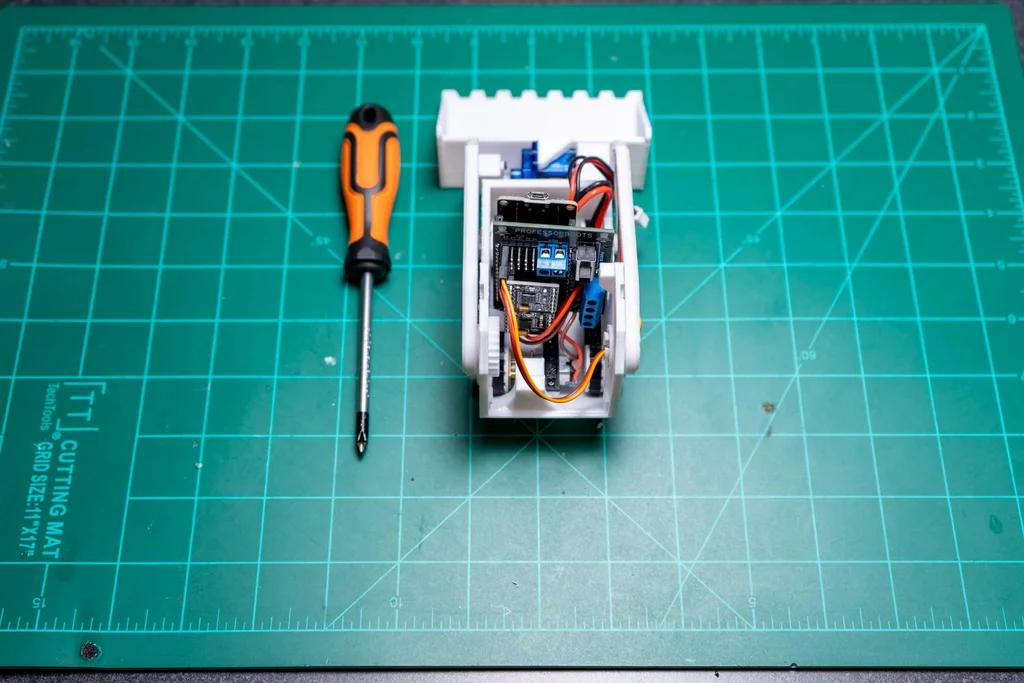
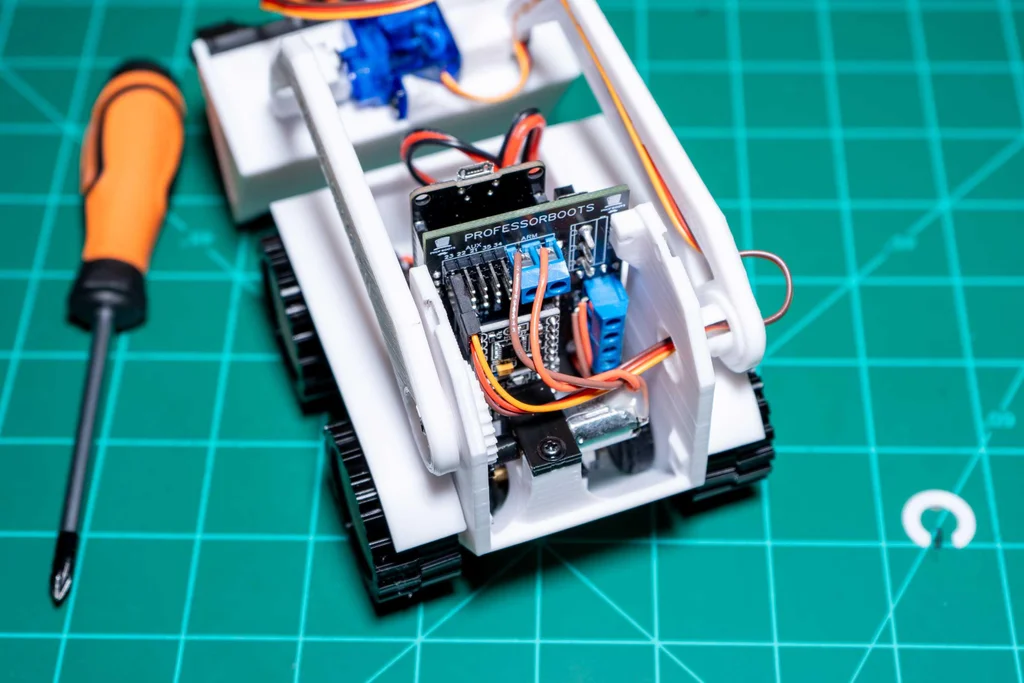
ابدأ بوضع مجموعة لوحة PCB على الجزء الأمامي من الهيكل الرئيسي لـ MiniSkidi، مع توجيه جانب مفتاح التشغيل إلى الأعلى، قم بتمرير أسلاك محرك N20 الأيمن إلى طرف التوصيل اللولبي المخصص له، وعند التشغيل لأول مرة قد تحتاج إلى تبديل الأسلاك للحصول على اتجاه الحركة الأمامي والخلفي الصحيح، في حال استخدام تطبيق Dabble كرر نفس الخطوات لمحرك N20 الأيسر باستخدام الطرف اللولبي الأزرق المسمى L-MTR، أما في حال استخدام وحدة التحكم عبر صفحة الويب فتجاهل الطرف الأزرق المسمى L-MTR، وقم بتوصيل المحرك الأيسر بالطرف اللولبي الأزرق الموجود في أسفل اللوحة.
تم إزالة محرك الذراع في الصورة الأولى لتوضيح الرؤية بشكل أفضل، ولكن يجب تكرار نفس الخطوات وتثبيت أسلاك محرك الذراع في أماكنها المخصصة كما هو موضح في الشكل 4.1.
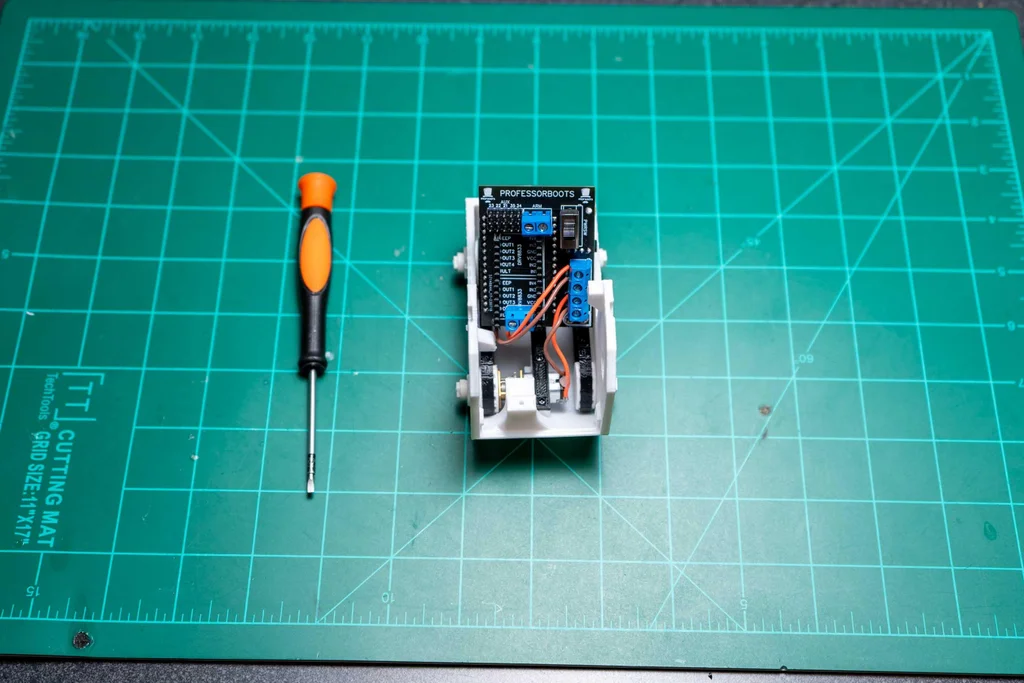
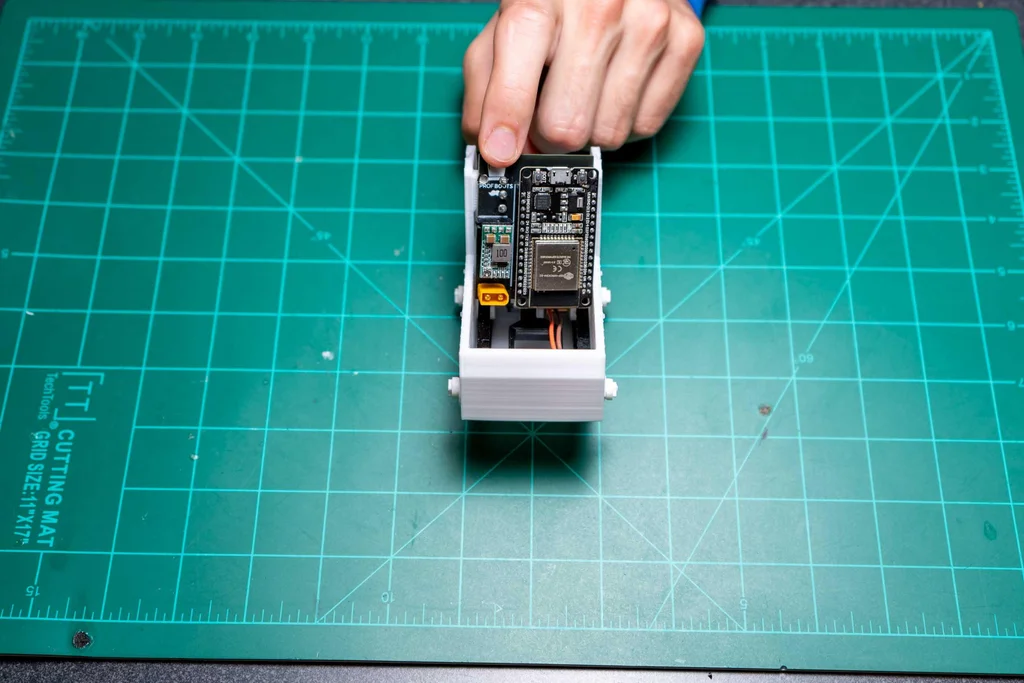
1- ابدأ بوضع دائرتي H-Bridge على لوحة PCB، مع إزالة محرك الذراع مؤقتًا لتحسين الرؤية، تأكد من تركيبهما بالاتجاه الصحيح من خلال مطابقة تسميات الدبابيس على دائرة H-Bridge مع تخطيط الدبابيس المطبوع على لوحة PCB، على سبيل المثال يجب التأكد من أن الدبوس المسمى EEP متطابق مع الموضع EEP على اللوحة كما هو موضح في الشكل 5.1.
2- قم بوضع محول خفض الجهد Buck Converter على لوحة الدائرة، مع التأكد من تطابق تسميات الدبابيس المطبوعة على اللوحة مع دبابيس المحول، أو لتسهيل الأمر يمكنك توجيه المحول بحيث يكون معظم وزنه متدليًا أسفل الدعامة كما هو موضح في الشكل 5.2.
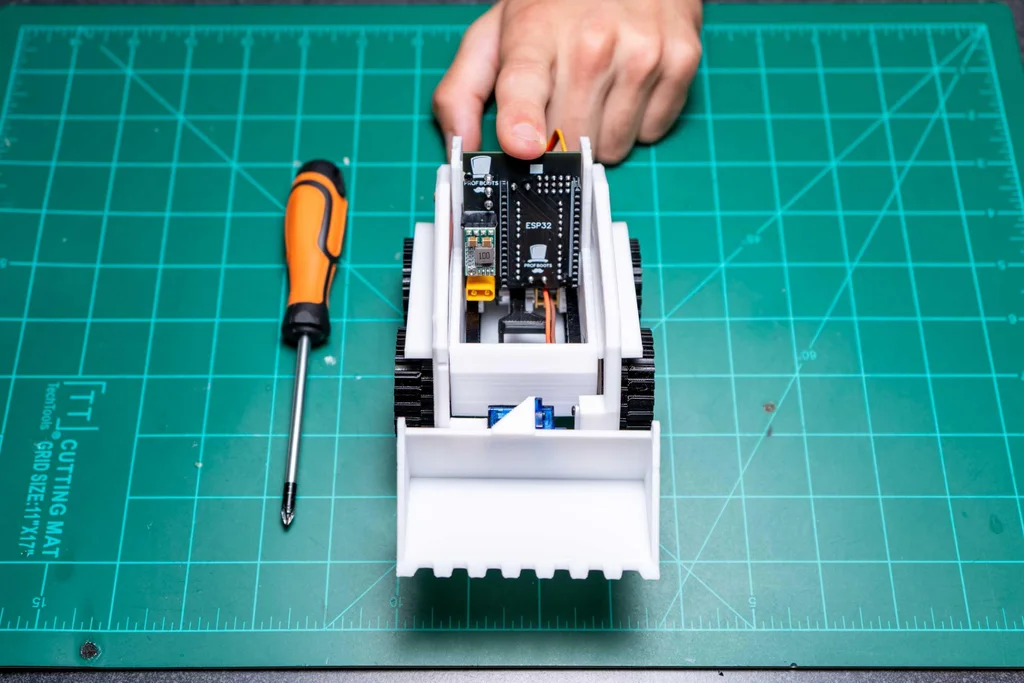
3- قم بتركيب لوحة ESP32 على لوحة PCB، مع التأكد من أن منفذ Micro USB متجه إلى الأعلى كما في الشكل 5.3.
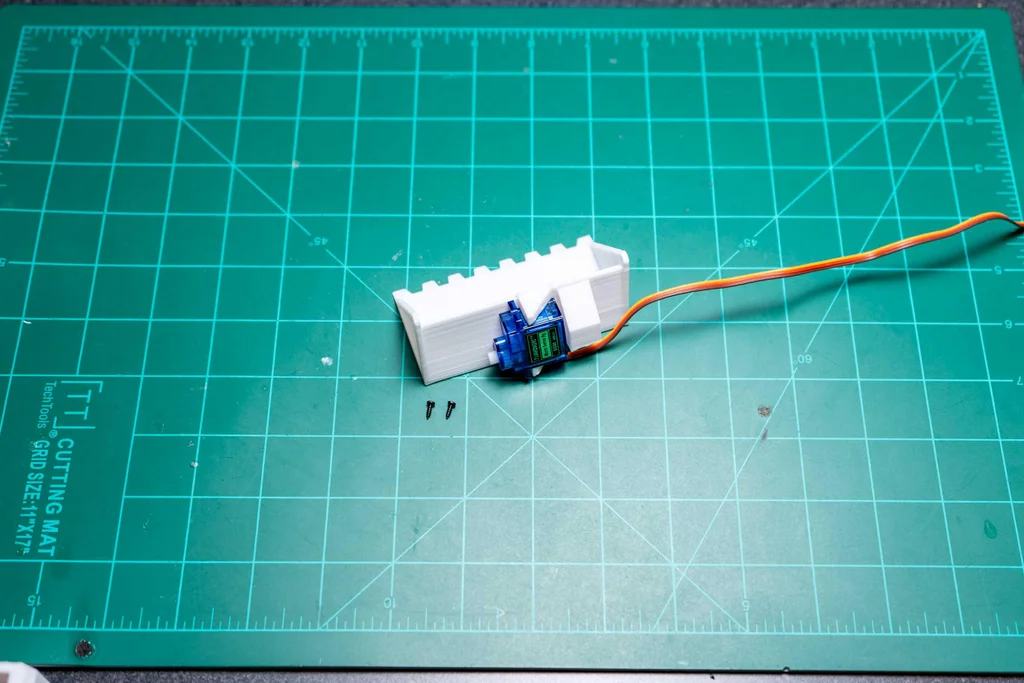
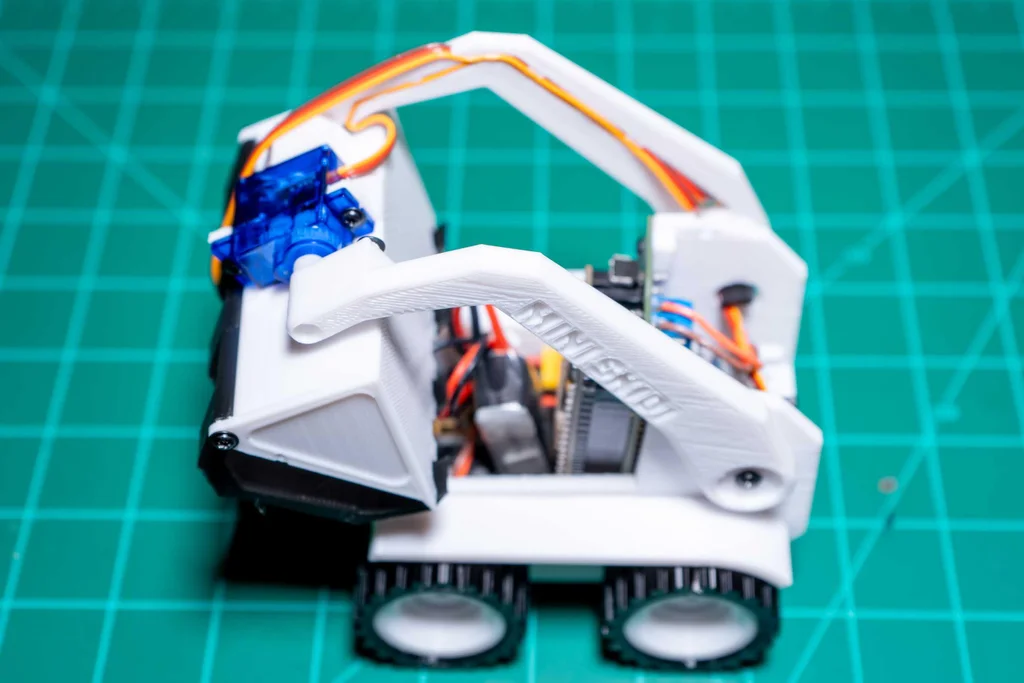
1- قم بوضع السيرفو داخل فتحة الدلو كما هو موضح في الشكل 6.1، ثم ثبته باستخدام مسمارين 2.6×6 من نوع Truss، وهي المسامير الصغيرة الموجودة في الطقم، وقد تكون من نوع Panhead في بعض الحالات.
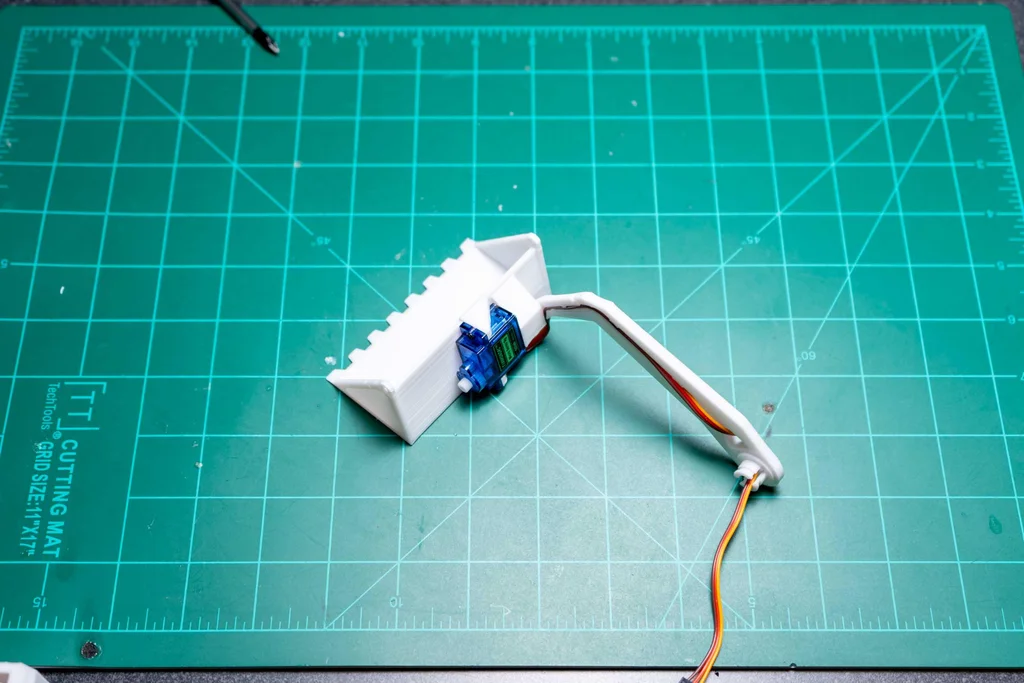
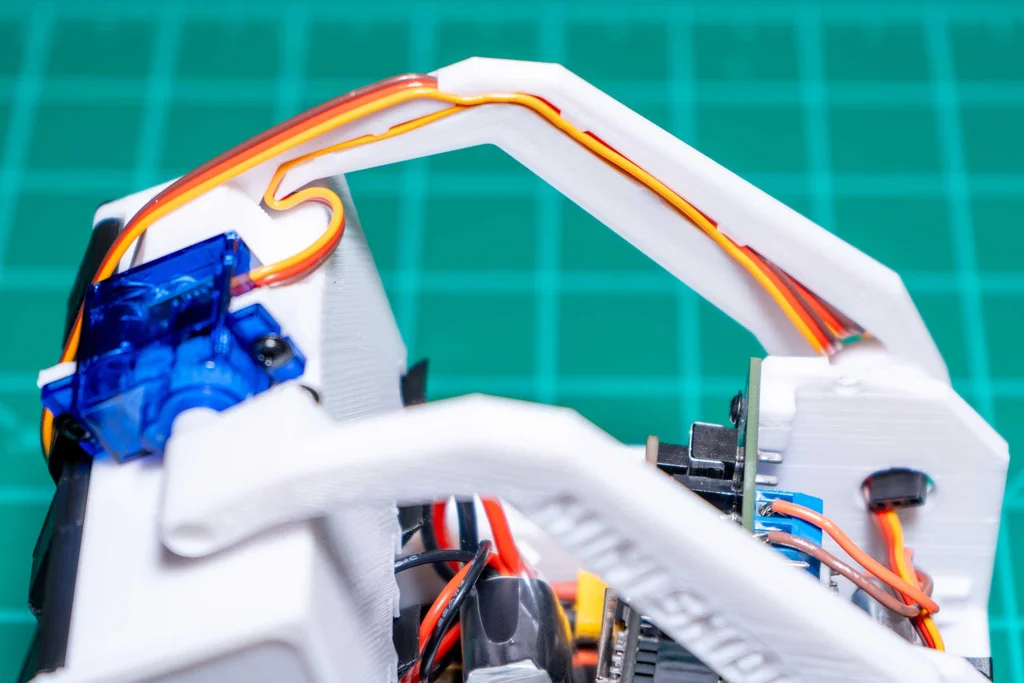
2- قم بتمرير سلك السيرفو على طول دليل الذراع الأيمن كما في الشكل 6.2، واترك حلقة صغيرة من السلك بين الدلو والذراع للسماح بالحركة الحرة دون شد.
3- قم بتثبيت الذراع في الدلو باستخدام مسمار M2.6×12، وهو أكبر مسمار موجود في الطقم، مع الانتباه إلى عدم الشد الزائد، حيث يجب أن يبقى الذراع قادرًا على الحركة للأمام والخلف بسلاسة ودون مقاومة.
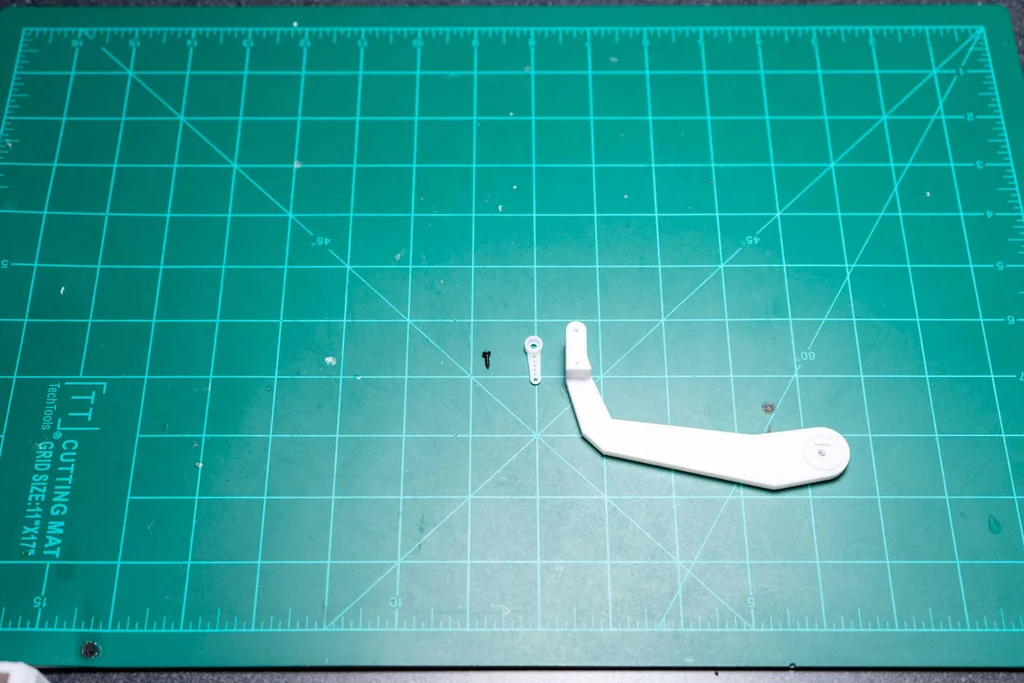
4- جهز الذراع الأيسر من خلال تثبيت ذراع السيرفو Servo Horn باستخدام مسمار 2.6×6 من نوع Truss، وهو من المسامير الصغيرة الموجودة في الطقم.
5- قم بتمرير سلك السيرفو عبر فتحة الذراع الأيمن في الهيكل الرئيسي، ثم ثبت الذراع في مكانه باستخدام مشبك C الكبير.
6- قم بتوصيل سلك السيرفو في مجموعة الدبابيس المسمى 23، مع التأكد من أن سلك الأرضي GND ذي اللون البني موصول بالصف السفلي المسمى GND.
7- لمعايرة وضع السيرفو بشكل صحيح، قم بتوصيل البطارية بـ MiniSkidi، ثم شغله بتحريك مفتاح التشغيل إلى الوضع السفلي، سيقوم السيرفو بالتحرك إلى أقصى وضعية رفع، وتُعد هذه فرصة ممتازة لفتح وحدة التحكم عبر صفحة الويب أو تطبيق Dabble والتأكد من أن محركات N20 موصلة بالاتجاه الصحيح، بحيث يتحرك الجهاز للأمام عند الضغط على الأمام، ويتجه لليمين عندما تتحرك المحاور اليمنى للخلف والمحاور اليسرى للأمام، وبعد الانتهاء قم بإيقاف تشغيل MiniSkidi وفصل البطارية، ويمكن الرجوع إلى قسم التشغيل والتجربة أدناه في الخطة الثالثة عشر لمعرفة كيفية الاتصال بوحدة التحكم.
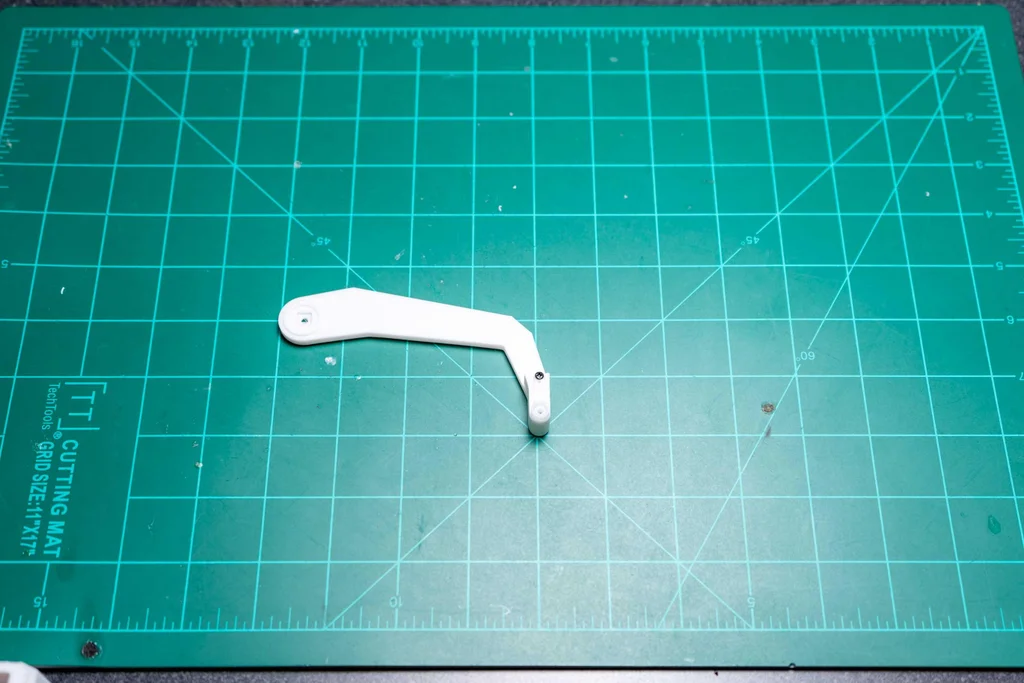
8- مع الحرص على عدم تحريك السيرفو، قم بإمالة الدلو بالكامل إلى الأعلى، ثم ضع ذراع السيرفو الخاص بالذراع الأيسر على السيرفو، بحيث يكون الذراع والدلو متقاربين جدًا من بعضهما، ثم ثبته في مكانه باستخدام مسمار ذراع السيرفو الفضي.
9- قم بتثبيت الذراع الأيسر من خلال أخذ الترس الكبير ودفع الطرف المربع إلى الخارج من داخل الهيكل الرئيسي، ثم قفله داخل الذراع الأيسر باستخدام مسمار M2.6×8 من نوع Truss، وهو من المسامير متوسطة الحجم الموجودة في الطقم.
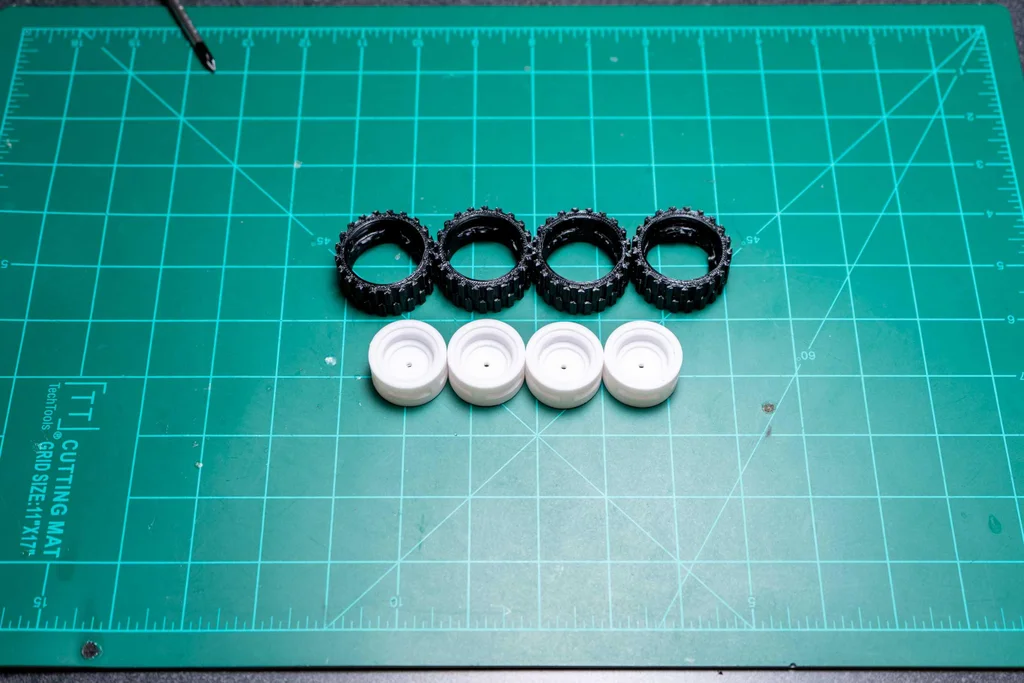
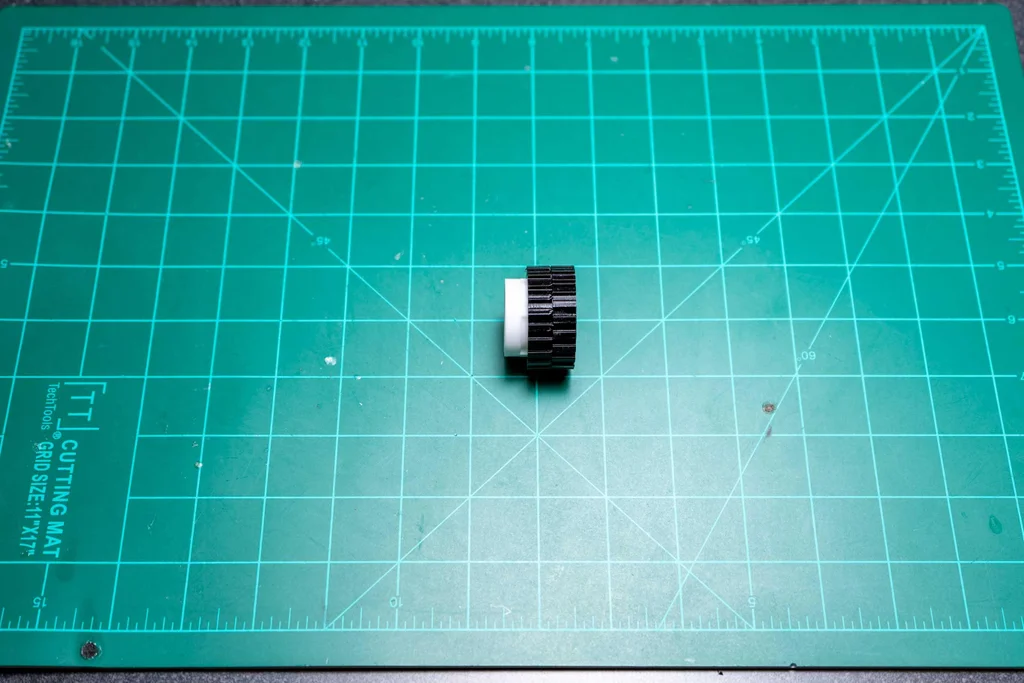
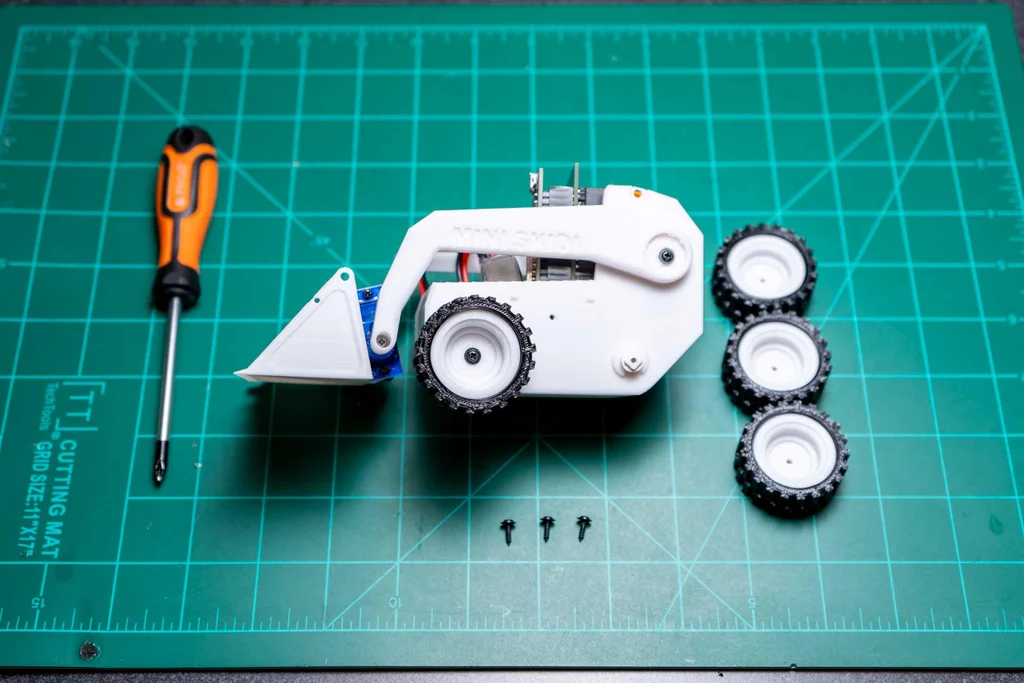
1- لتركيب إطارات TPU على العجلات، خذ كل إطار واضغط الجهة الخلفية للعجلة بداخله، ستلاحظ أن أحد الجانبين يدخل أكثر من الآخر، وهذا هو الجانب الذي يجب إدخال العجلة منه، وبعد التركيب الكامل يجب أن يظهر نتوء صغير على الجهة الخارجية للإطار، مع العلم أن هذه الخطوة تتطلب بعض القوة اليدوية.
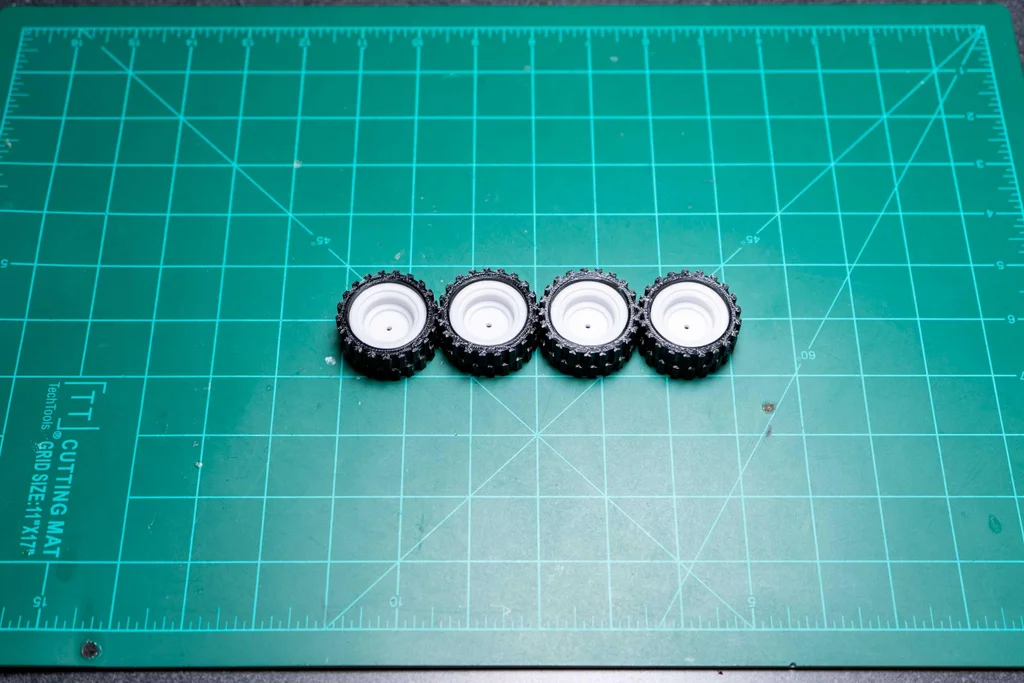
2- بعد التأكد من أن الجزء المسطح في محاور الدوران والسطح الداخلي للعجلات مستويان تمامًا لضمان عدم وجود اهتزاز، قم بتثبيت العجلات على المحاور باستخدام أربعة مسامير 2.6×8 من نوع Truss، وهي المسامير متوسطة الحجم في الطقم، مع تحريك الإطار قليلًا بعد التثبيت للتأكد من جلوسه بشكل صحيح.
باستخدام مسمارين 2.6×8 من نوع Truss، قم بتثبيت أغطية العجلات على الجانبين الأيمن والأيسر، يوجد نتوءان صغيران على كل جانب يمنعان الغطاء من الدوران، لذلك تأكد من ضغط الغطاء إلى أعلى فوق هذه النتوءات بحيث تقوم بدعم الجزء السفلي بشكل صحيح.
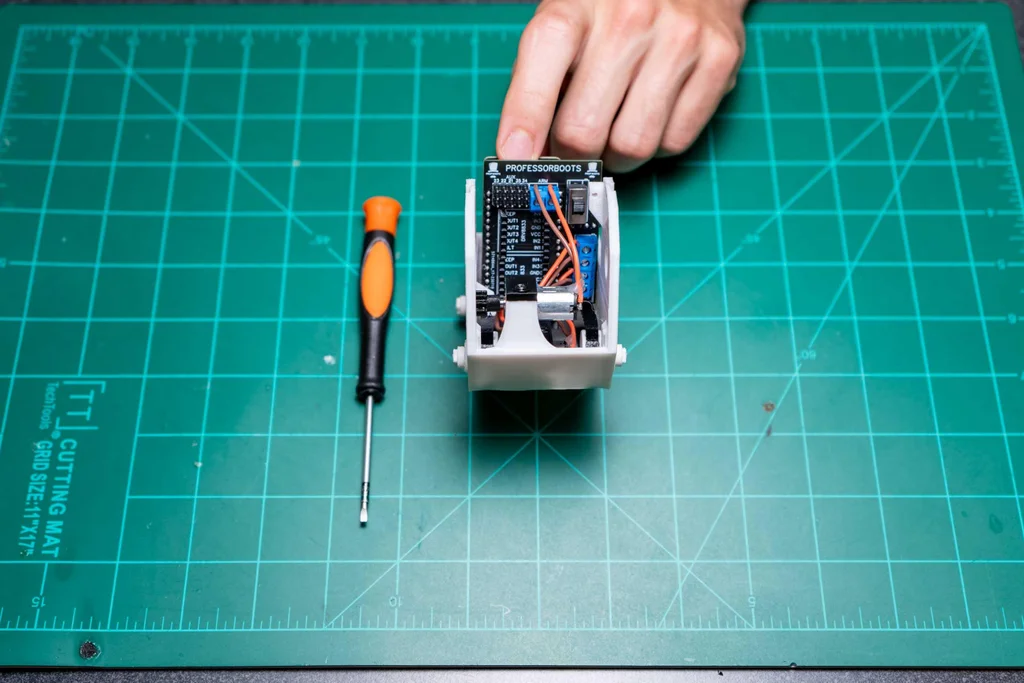
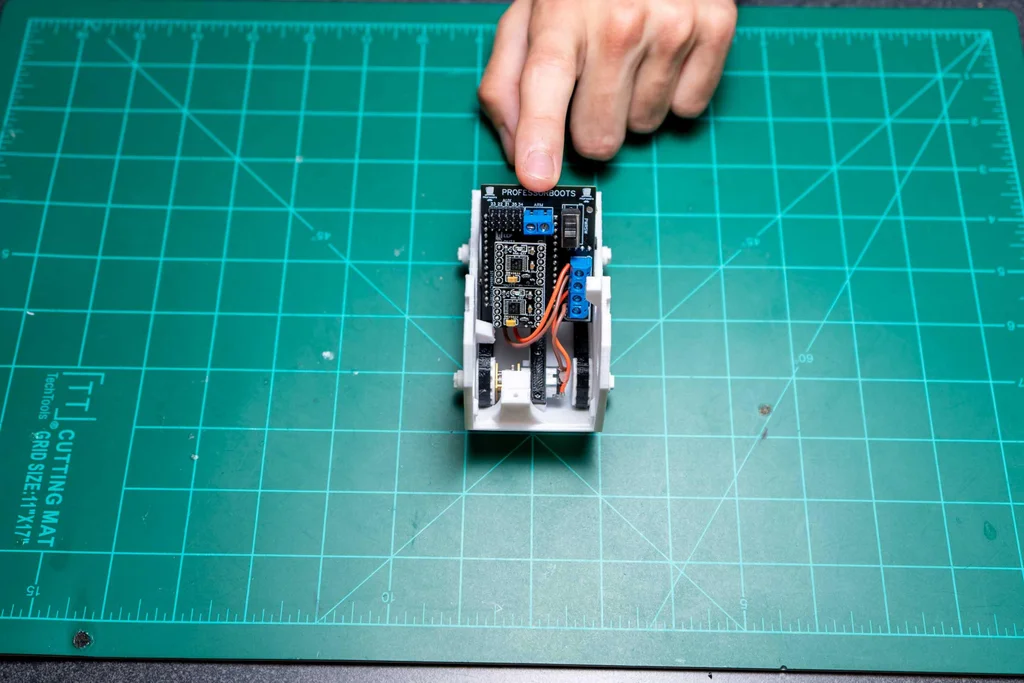
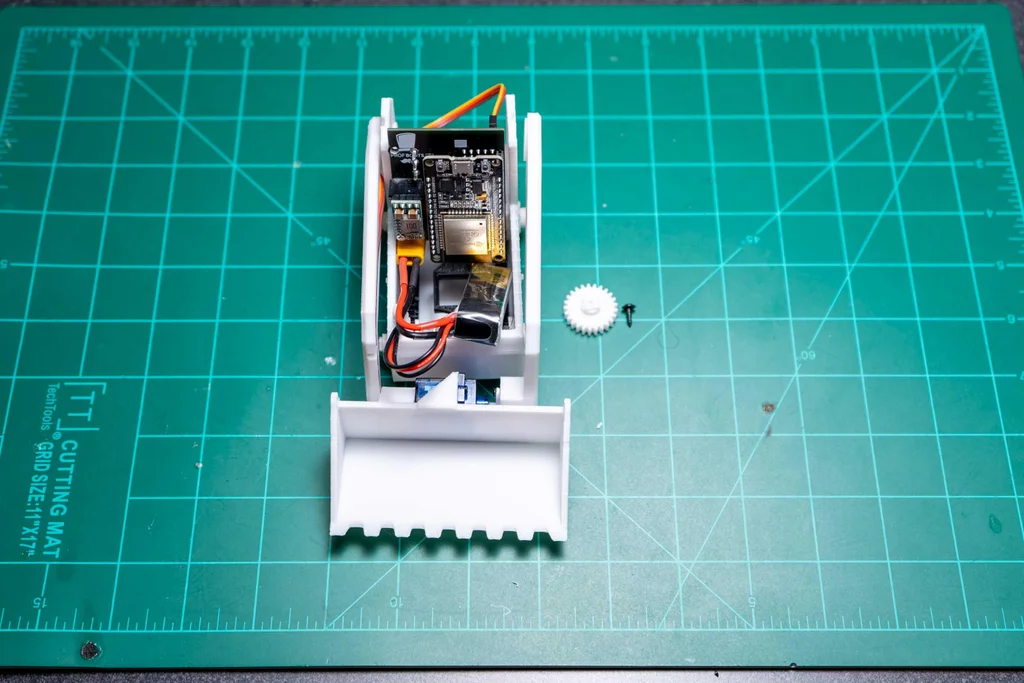
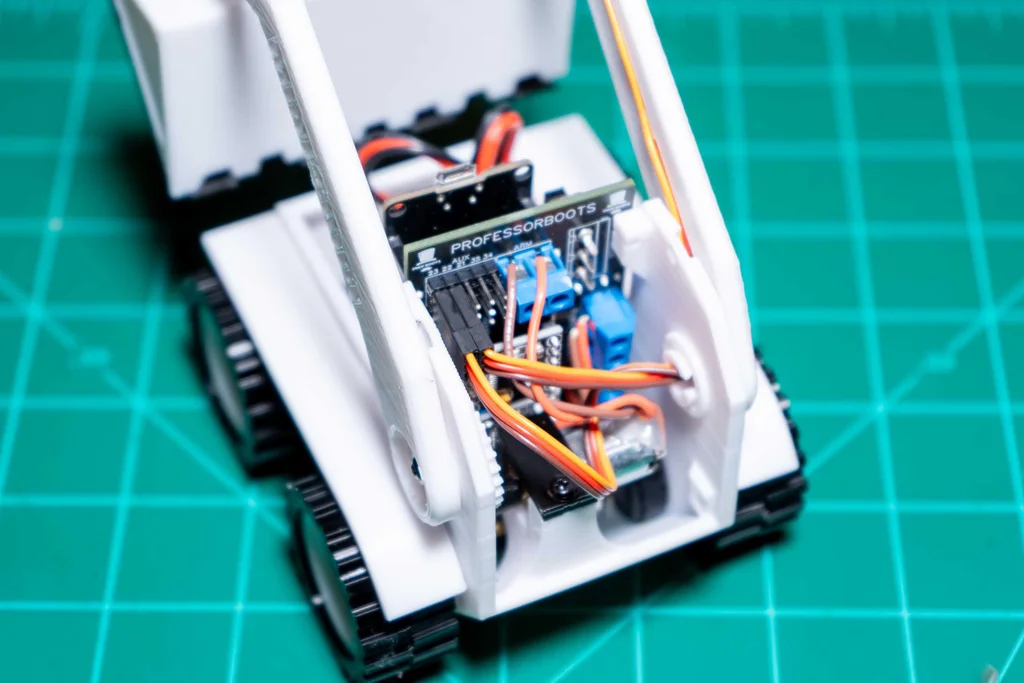
قم بإزالة لوحة ESP32 مؤقتًا، ثم باستخدام مسامير 2.6×6 من نوع Truss، وهي المسامير الصغيرة الموجودة في الطقم وقد تكون من نوع Panhead بدلًا من Truss، ثم قم بتثبيت مجموعة لوحة PCB على دعامتي التثبيت المرفقتين كما هو موضح في الشكل 10.1، ثم ابدأ بالدعامة العلوية اليسرى، بينما تعمل الدعامة السفلية اليمنى بشكل أساسي على توفير دعم ضد الدوران كما هو موضح في الشكل 9.1، وبعد تثبيت اللوحة أعد تركيب ESP32 مرة أخرى في مكانه.
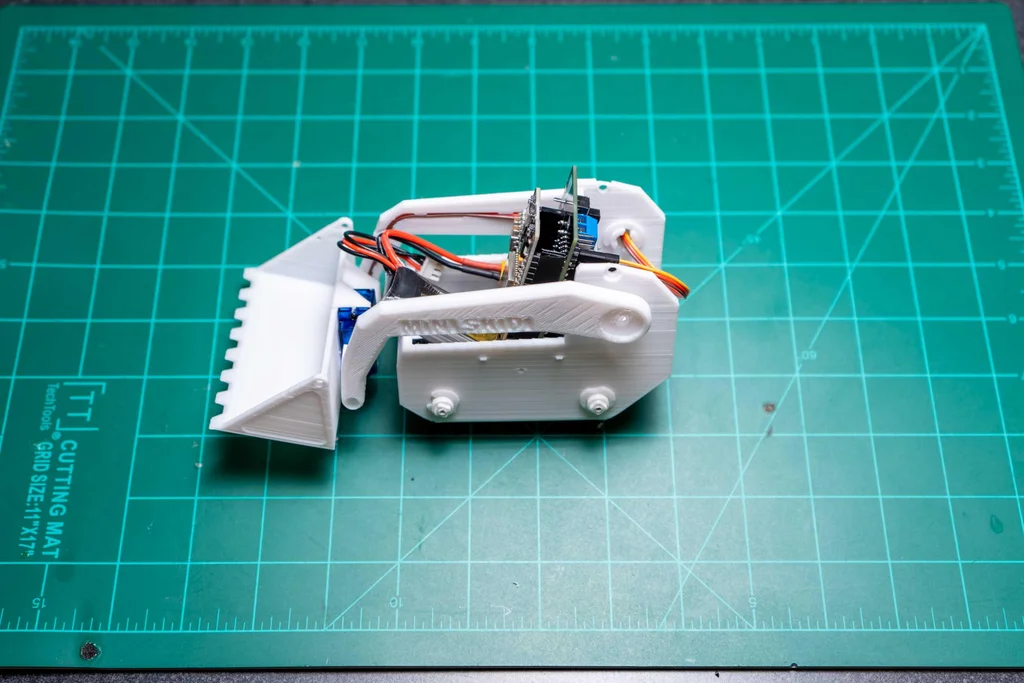
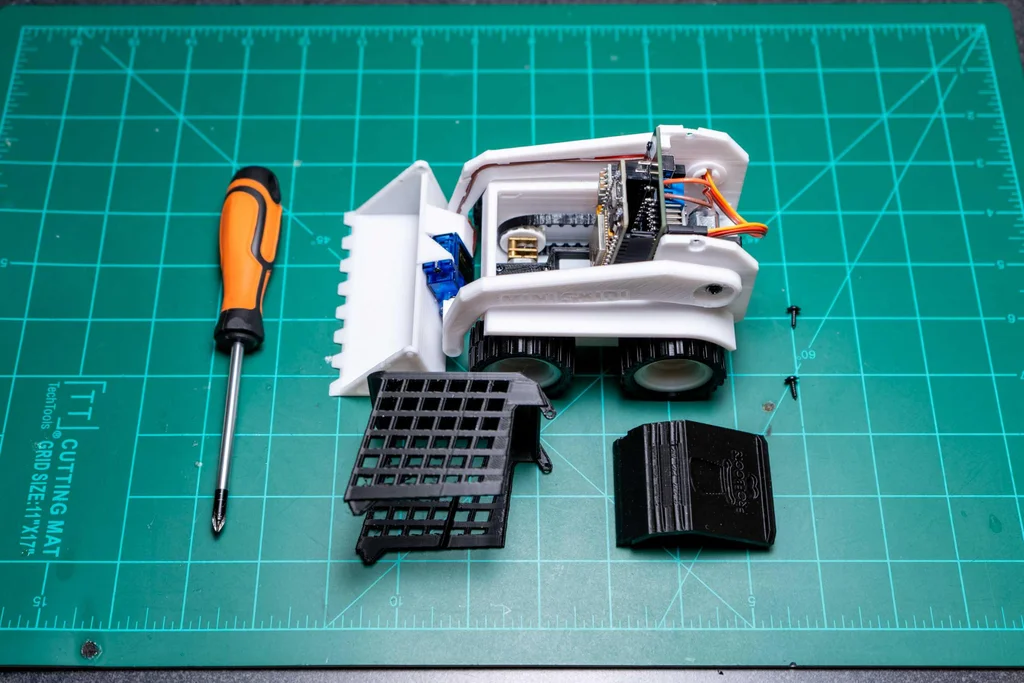
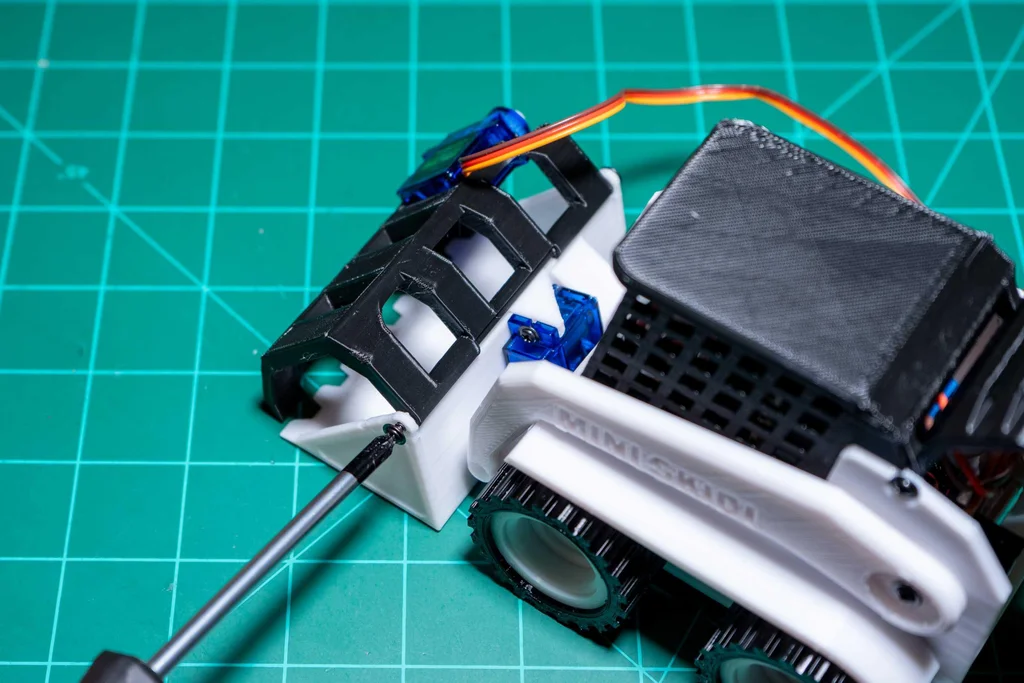
1- ابدأ بتركيب القفص وغطاء المحركات من خلال ضغط القفص أولًا على الهيكل الرئيسي، حيث يوجد ثقبان في القفص يجب أن يتطابقا مع الثقوب الموجودة في الهيكل الرئيسي كما هو موضح في الشكل 11.1، كما توجد لسانان في أسفل القفص يعملان على تثبيته مؤقتًا أثناء طيه للأسفل.
2- بعد ذلك خذ غطاء المحركات وقم بإدخاله بين جانبي القفص مع محاذاة الثقوب، وتأكد قبل ذلك من أن الثقوب الموجودة في غطاء المحركات خالية من أي بقايا خيوط طباعة زائدة، ثم استخدم مسمارين M2.6×12، وهي أطول المسامير الموجودة في الطقم، لتثبيت جميع الأجزاء في مكانها.
3- قبل إغلاق غطاء المحركات بالضغط، تأكد من ترتيب أسلاك السيرفو بشكل منظم وبعيد عن مناطق الحركة حتى لا تعيق الإغلاق، وعند الضغط لإغلاق الغطاء تجنب تمامًا الضغط أو السحب من العجلات، لأن ذلك قد يؤدي إلى كسر عمود الدوران، وبدلًا من ذلك اضغط على الجزء الأمامي من الهيكل أثناء إغلاق الغطاء، ويجب التنويه إلى أن إغلاق غطاء المحركات للمرة الأولى يتطلب قدرًا لا بأس به من القوة.
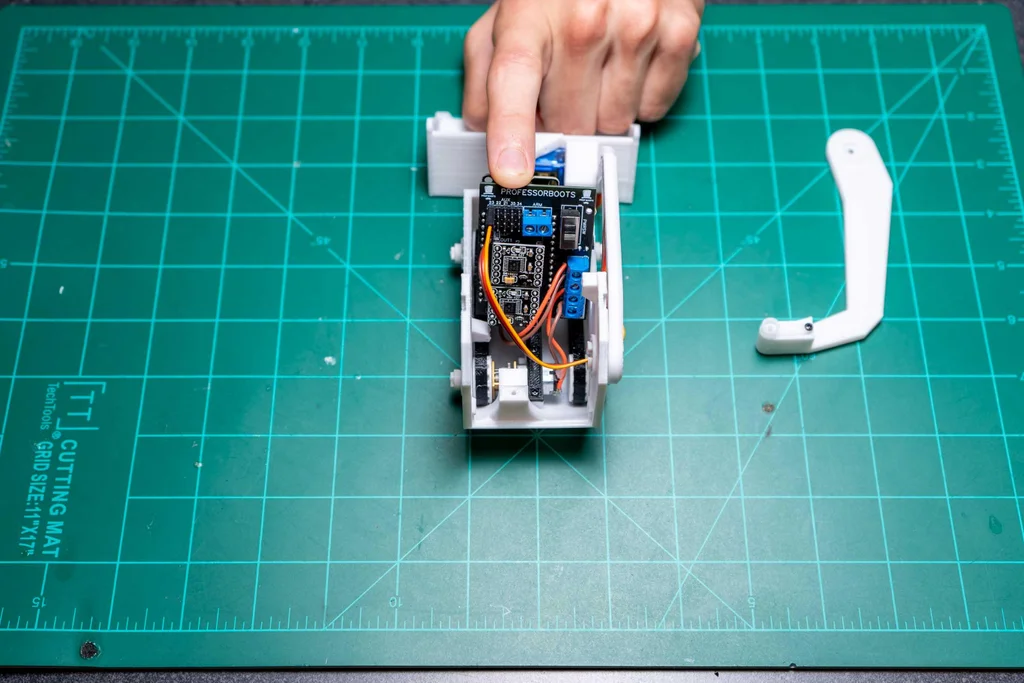
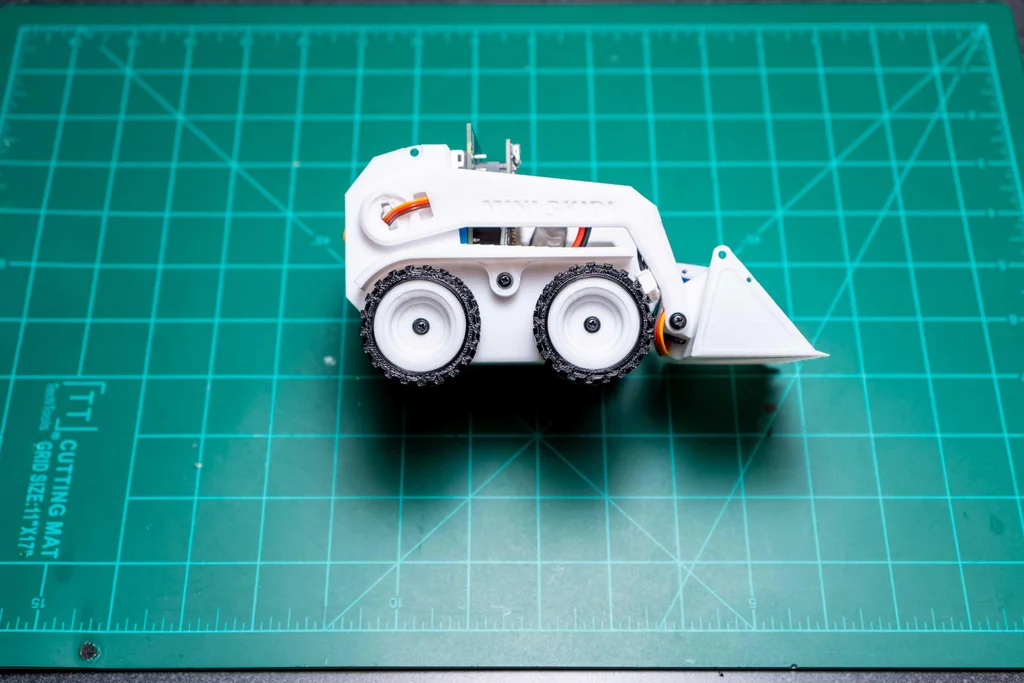
في هذه المرحلة يجب أن تكون جميع الأجزاء قد تم تجميعها بالكامل، قم بإعادة توصيل البطارية إذا كانت مفصولة، ثم شغّل جهاز MiniSkidi.
استخدام وحدة التحكم عبر صفحة الويب
قم بالاتصال بـ MiniSkidi من خلال الدخول إلى إعدادات شبكة WiFi والبحث عن الشبكة المسماة "Profboots MiniSkidi --"، وبعد الاتصال بها افتح متصفح الإنترنت المفضل لديك، ثم أدخل عنوان IP الافتراضي الخاص بوحدة ESP32 وهو 192.168.4.1
ستظهر لك وحدة التحكم الخاصة بـ MiniSkidi على الشاشة، خيار "HorizontalScreen" مخصص لتثبيت الهاتف في الوضع الرأسي مع إمساكه بشكل أفقي، حيث يعيد هذا الخيار توجيه عناصر التحكم لتصبح منطقية، فعلى سبيل المثال الاتجاه الذي كان للأمام يصبح الآن لليسار، واليمين يصبح للأمام.
استخدام تطبيق Dabble
قم بفتح تطبيق Dabble ثم اختر وضع Gamepad، في أعلى يمين الشاشة ستجد أيقونة على شكل قابس، اضغط عليها وابحث عن اسم البلوتوث "ProfBoots MiniSkidi" ثم قم بالاتصال به.
تأكد من أن جميع الحركات تعمل بالشكل المطلوب، وفي حال لاحظت أن أحد الاتجاهات معكوس مثل تحرك الذراع للأعلى عند الضغط للأسفل أو العكس، قم بعكس الأسلاك الخارجة من الطرف اللولبي الخاص بذلك المحرك، وبعدها استمتع بالتجربة.
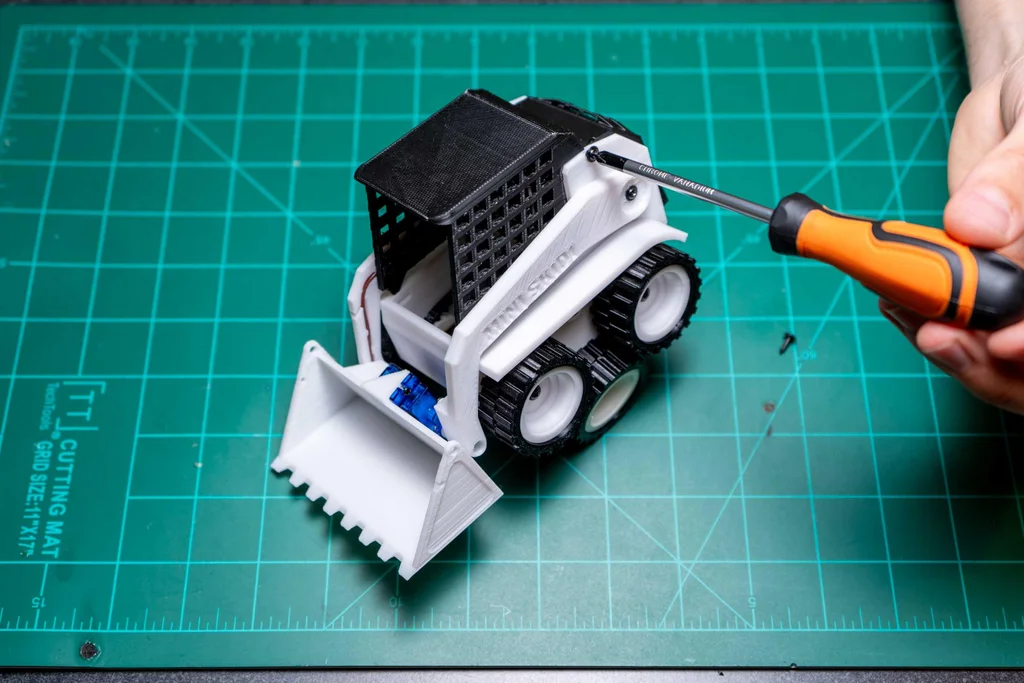
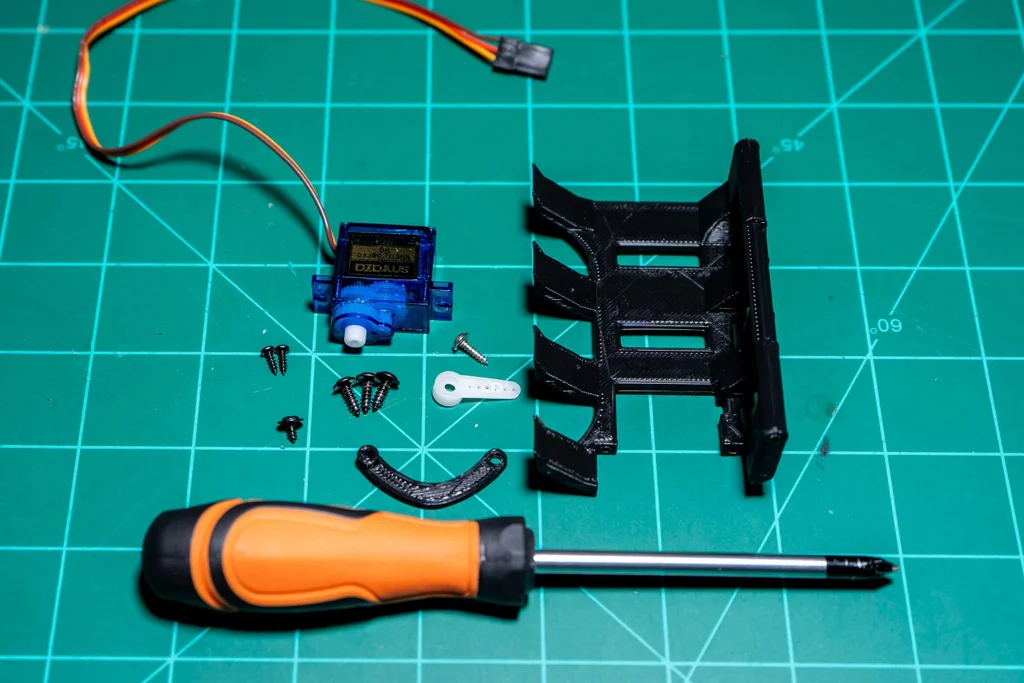
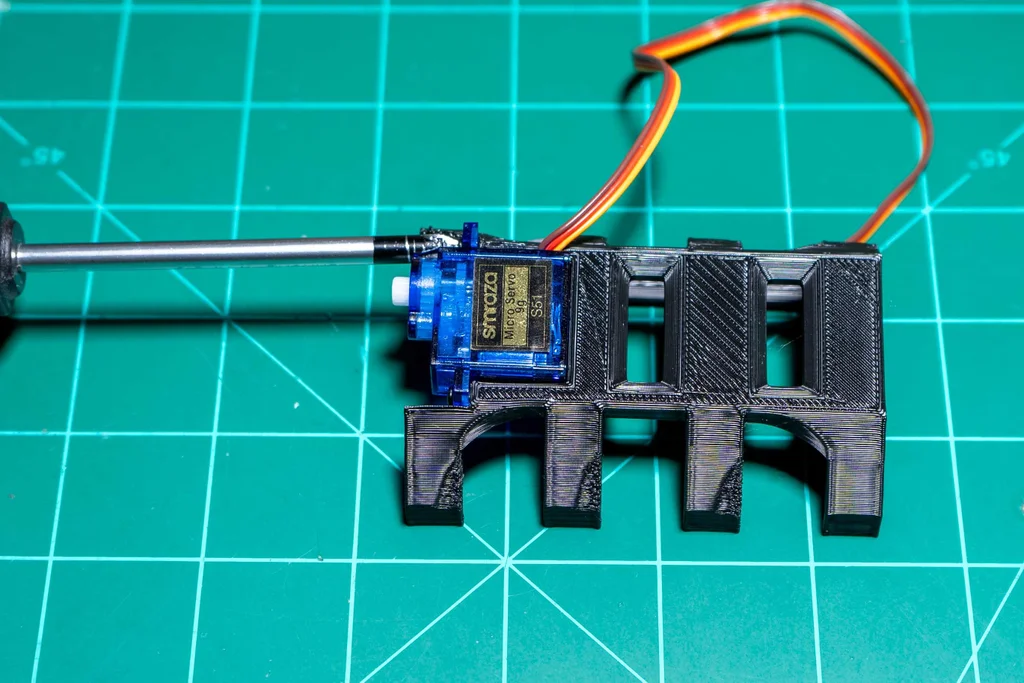
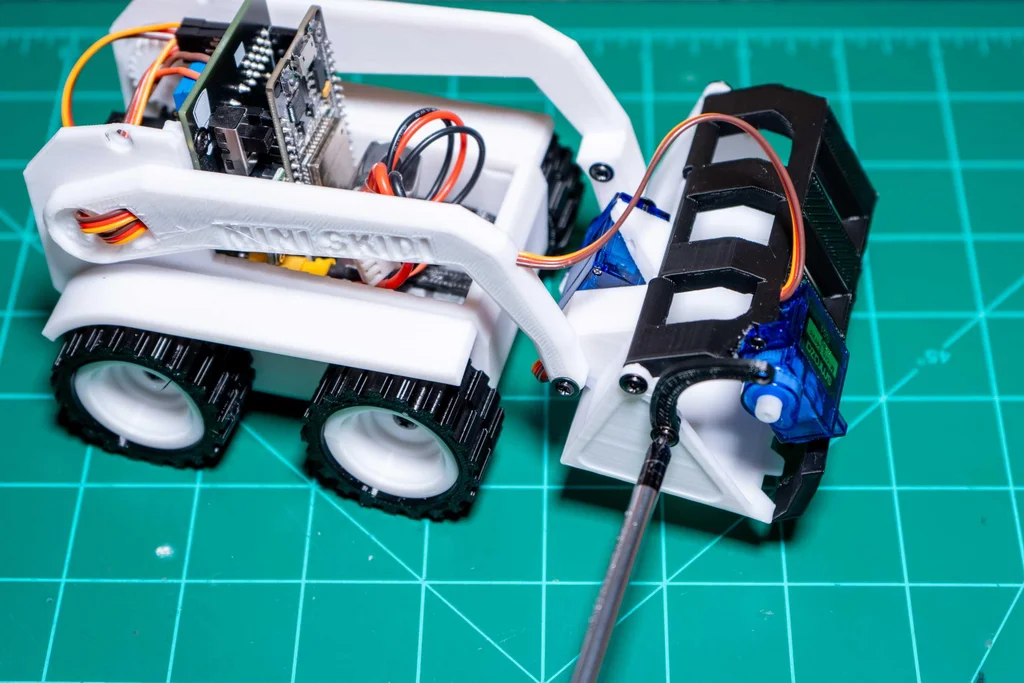
1- ابدأ بتثبيت سيرفو SG90 على الكلّابة باستخدام مسمارين 2×6 مم.
2- قم بتثبيت مجموعة الكلّابة على الدلو باستخدام مسمارين 2×6 أو 2×8 مم.
3- قم بإزالة القفص وغطاء المحركات من الهيكل الرئيسي، ثم أزل مشبك C الذي يثبت الذراع الأيمن وذلك بالضغط على طرفي المشبك معًا.
4- ارفع الذراع بحيث يصبح الدلو أعلى من جسم الـ SkidSteer، ثم قم بطي الدلو بحيث يكون متجهًا مباشرة إلى الأسفل، في هذا الوضع قم بتمرير سلك سيرفو الكلّابة على طول الذراع كما هو موضح في الصورة، وتأكد من سحب أي ارتخاء في السلك قبل ضغطه داخل مجرى الأسلاك، ولا تقلق إذا احتاج الأمر إلى بعض القوة لإدخال السلك بجانب السلك الآخر، فهذا يضمن ثباته وعدم خروجه.
5- قم بضغط سلك سيرفو الدلو داخل فتحات القطع نصف الدائرية العلوية والسفلية، مع تمرير سلك الكلّابة عبر الذراع الأيمن، ثم قم بتوصيل سلك سيرفو الكلّابة في الطرف رقم 22، مع التأكد من أن سلك الأرضي GND ذو اللون البني في الصف السفلي، إذا لم يصل السلك للطرف المطلوب قم بإخراجه قليلًا من الذراع وشد الارتخاء للحصول على طول إضافي، ثم أعد تركيب مشبك C الخاص بالذراع الأيمن.
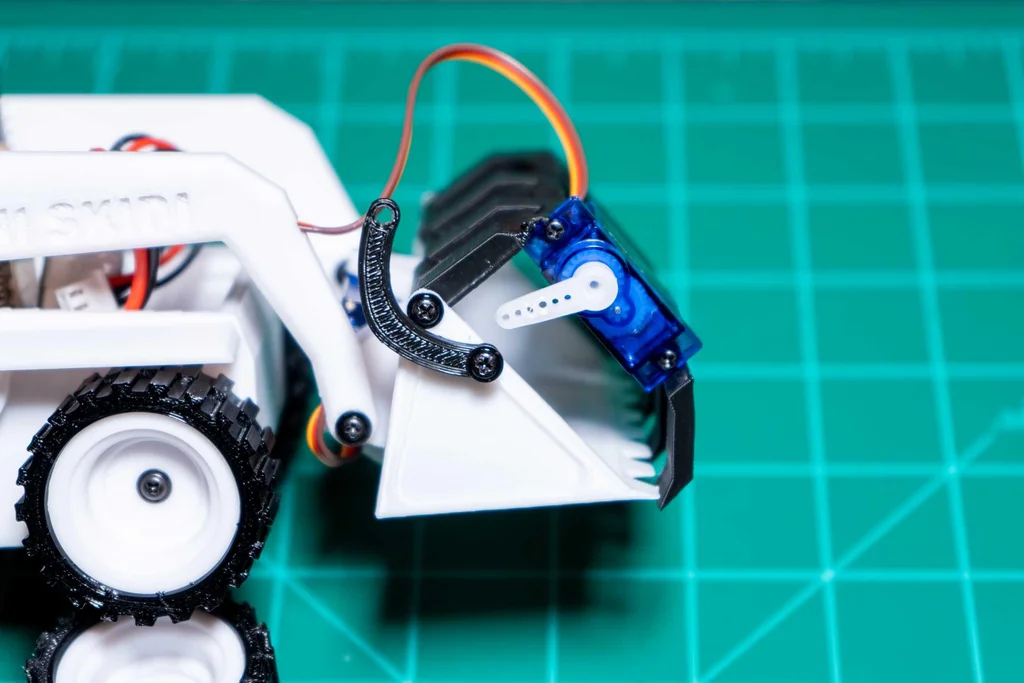
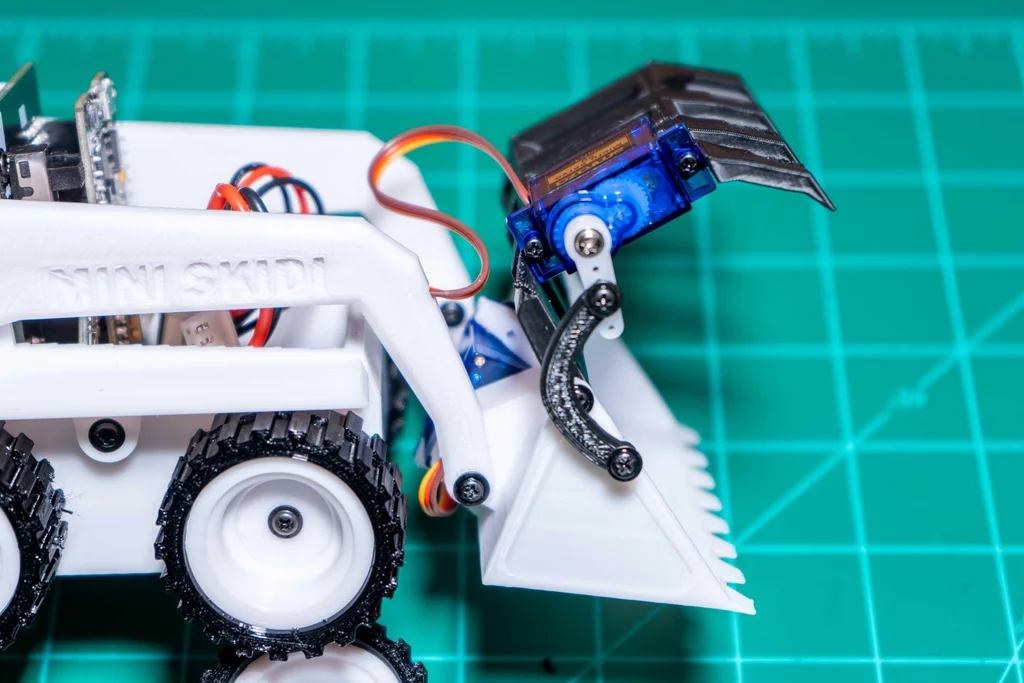
6- خذ قضيب دفع الكلّابة وقم بتوجيهه بحيث يكون الجزء الممتد مواجهًا للدلو، ثم ثبت الطرف السفلي في مكانه باستخدام مسمار 2×6 أو 2×8 مم.
7- لضمان أن السيرفو في الوضع الصحيح، قم أولًا بتشغيل MiniSkidi، حيث سيقوم السيرفو بالتحرك إلى الوضع المطلوب، بعد ذلك قم بتركيب ذراع السيرفو بزاوية أقل بدرجة واحدة من 90 درجة كما هو موضح في الصورة.
8- ثبّت ذراع السيرفو في مكانه باستخدام أحد مسامير SG90 الفضية، ثم قم بتوصيل قضيب دفع الكلّابة في الثقب الرابع من نهاية ذراع السيرفو باستخدام مسمار 2×5 مم.
9- في حال وجود ارتخاء أثناء استخدام الكلّابة، يمكن ضبط ذلك إما بتحريك ذراع السيرفو على السيرفو نفسه، أو بتغيير موضع تثبيت قضيب الدفع إلى ثقب آخر في ذراع السيرفو.
تسجيل الدخول مطلوب
يجب عليك تسجيل الدخول لإضافة تعليق.
تسجيل الدخول