
مرحبًا بك، في هذا المشروع على موقع يدويات سأقوم بشرح طريقة صناعة سيارة روبوت يتم التحكم بها باستخدام الهاتف الذكي، وتعمل بنظام دفع سداسي 6WD، حيث ستتعرف على جميع المكونات والخطوات اللازمة لتنفيذ المشروع بشكل عملي وناجح.
تعتمد هذه السيارة الروبوتية على الاتصال عبر شبكة Wi-Fi، مما يتيح لك التحكم بها لاسلكيًا، كما يمكن قيادتها على معظم الأسطح غير المنتظمة، وقد قمت باختبارها على أنواع متعددة من التضاريس المختلفة في محيطي، وكانت النتيجة مدهشة للغاية، إذ أظهرت أداءً قويًا وثابتًا، ويعود ذلك إلى استخدام ستة محركات مسننة تقوم بقيادة العجلات مباشرة، مما يوفر عزم دوران مرتفعًا يساعد السيارة على التغلب على العوائق.
وباختصار قبل الدخول في التفاصيل، دعني أوضح لك فكرة عمل هذه السيارة الروبوتية.
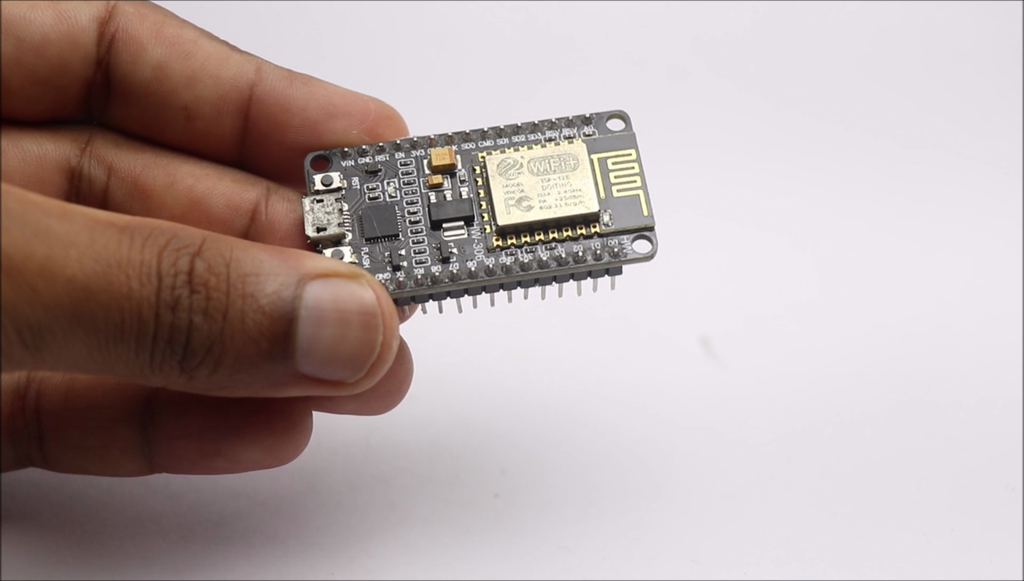
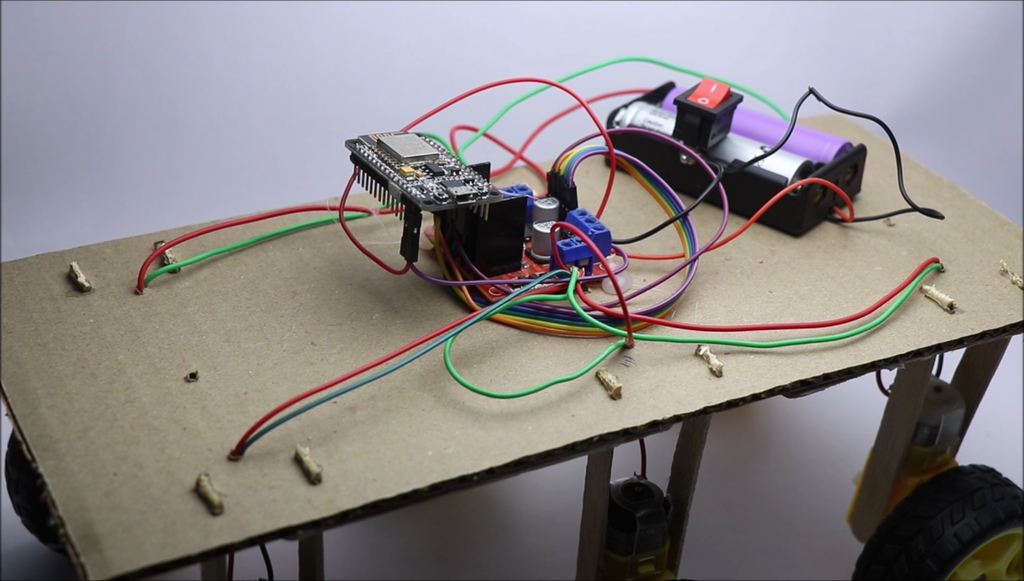
تعتمد السيارة على لوحة ESP8266، وهي لوحة تحكم مشهورة بوجود وحدة Wi-Fi مدمجة داخلها، بالإضافة إلى كونها منخفضة التكلفة ومتاحة بسهولة، مما يجعلها خيارًا مثاليًا لمشاريع الروبوتات التي تعتمد على الاتصال اللاسلكي.
تقوم لوحة ESP8266 بالتحكم في متحكم المحركات وتشغيل العجلات، ويتم إرسال أوامر الحركة من الهاتف الذكي إلى اللوحة من خلال تطبيق مخصص، حيث تستقبل اللوحة هذه الأوامر وتحوّلها إلى إشارات تتحكم في حركة المحركات.
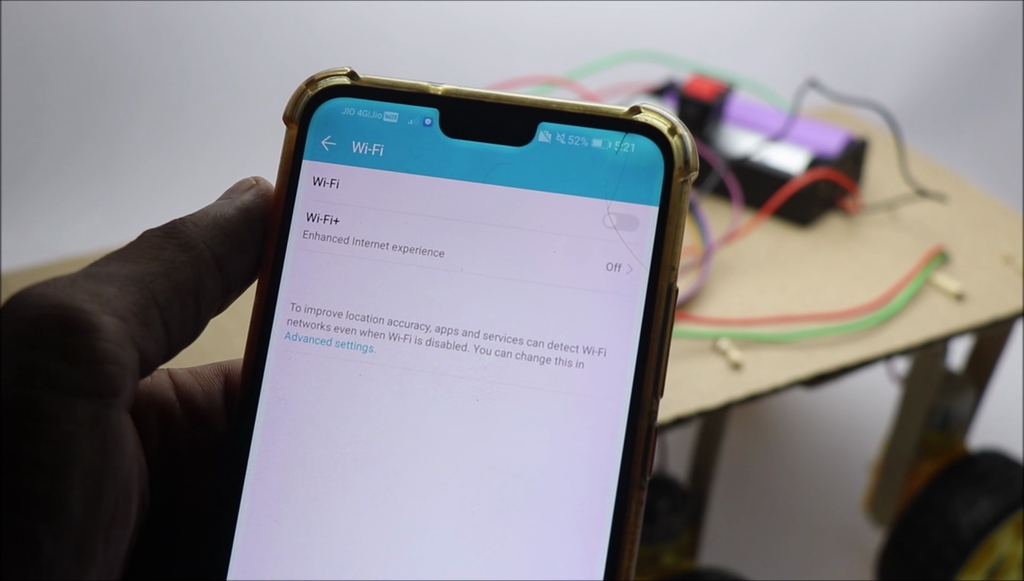
لاستخدام السيارة الروبوتية، كل ما عليك فعله هو تشغيل Wi-Fi على هاتفك، ثم الاتصال بالشبكة الخاصة بالسيارة، وبعد ذلك فتح التطبيق والبدء في القيادة على التضاريس التي تختارها.
في هذا المشروع قمت بشرح جميع الخطوات المطلوبة لبناء السيارة، بالإضافة إلى توفير مخطط الدائرة الكهربائية وشرح طريقة التشغيل، مما يجعله مناسبًا حتى للمبتدئين الراغبين في دخول عالم الإلكترونيات والروبوتات.
ملاحظة: بعض هذه الروابط تابعة، وقد أحصل على نسبة بسيطة جدًا من المبيعات دون أي تكلفة إضافية عليك، ويساعدني ذلك على الاستمرار في تنفيذ وتوثيق مثل هذه المشاريع التعليمية.
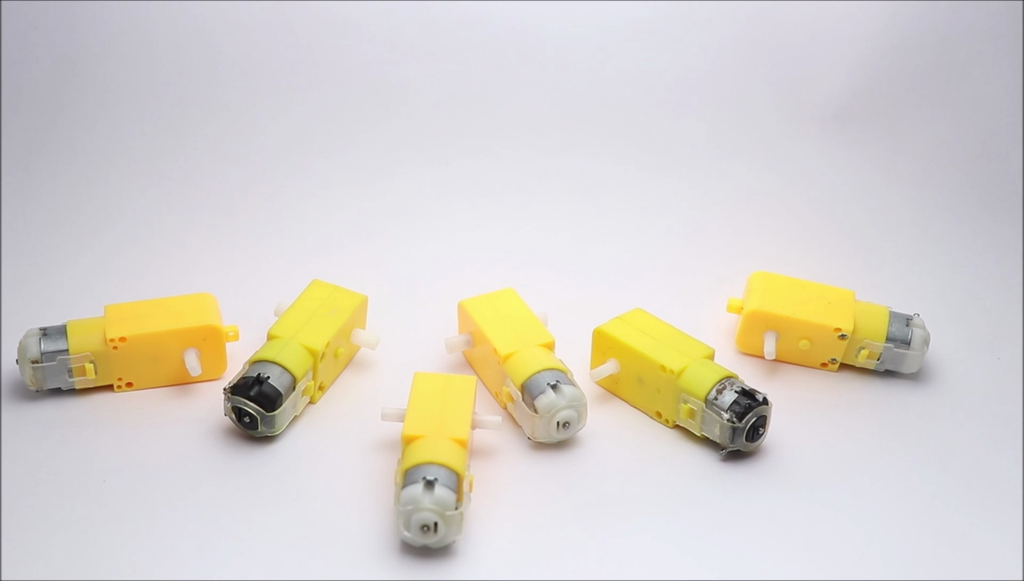


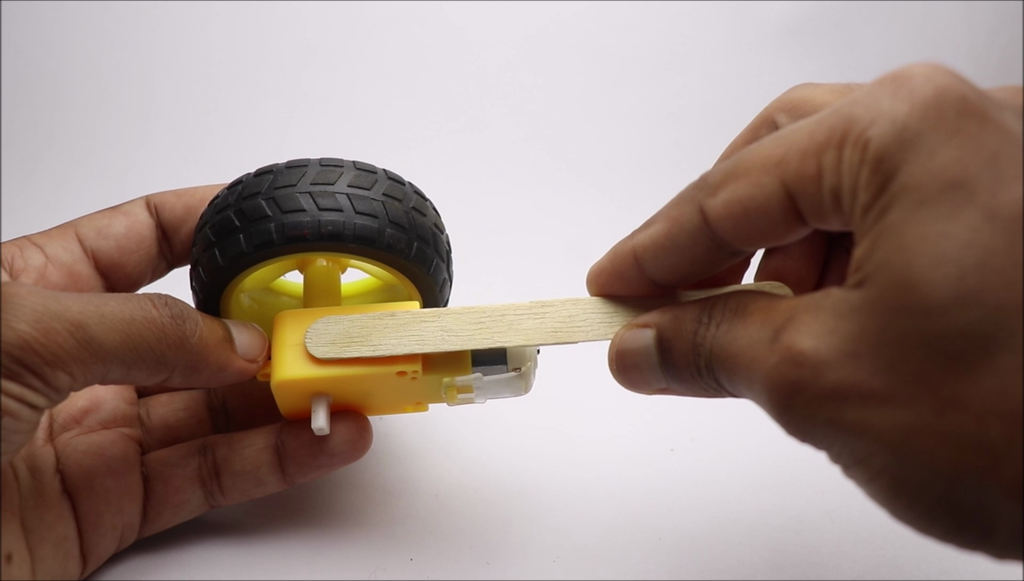
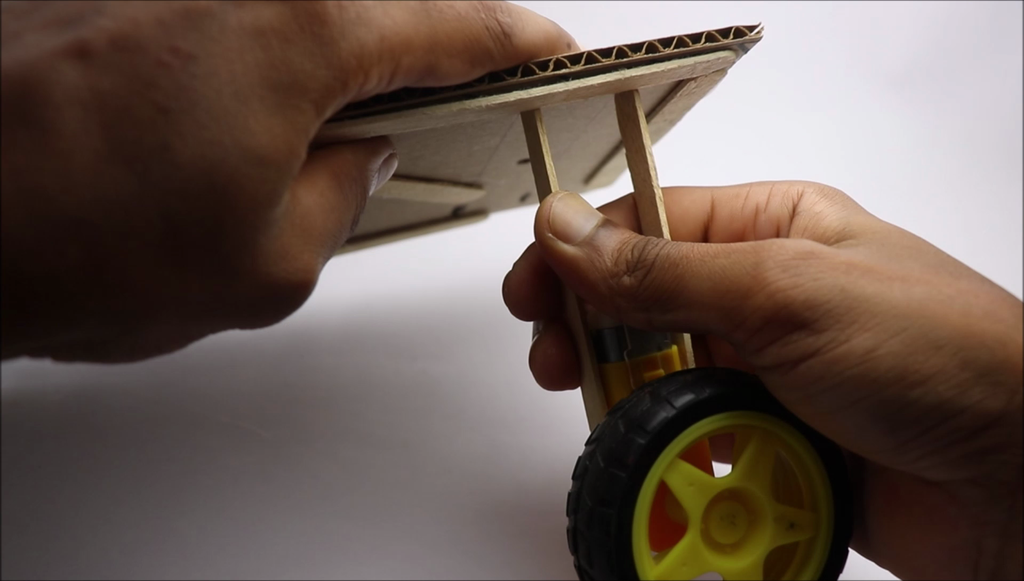
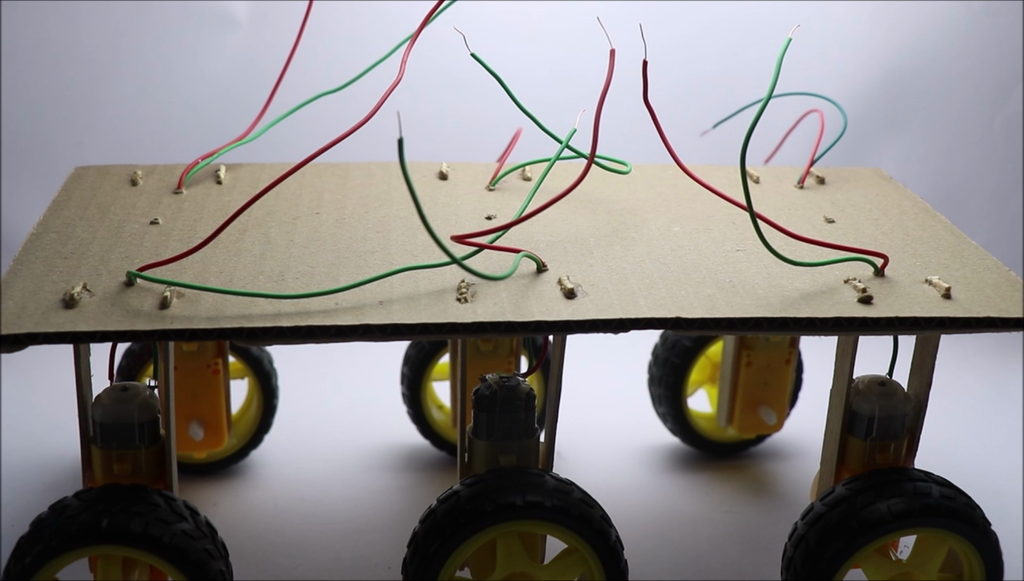
بعد الانتهاء من جمع جميع المواد والأدوات نبدأ أولى مراحل التنفيذ، وهي تركيب العجلات على المحركات، وفي هذا المشروع تم استخدام محركات ذات عمود مزدوج، مع مراعاة تركيب العجلات في الجهة المقابلة لنقطة توصيل أسلاك محرك التيار المستمر.
يساعد هذا الأسلوب في إخفاء أسلاك المحركات بشكل أفضل، كما يمنع تشابكها أو تعرضها للشد أثناء حركة السيارة.
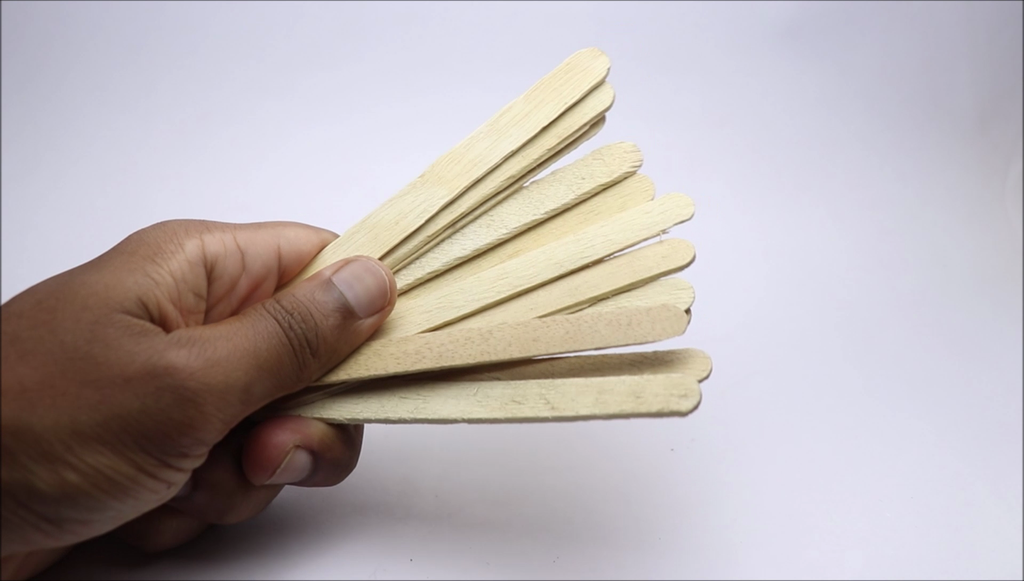
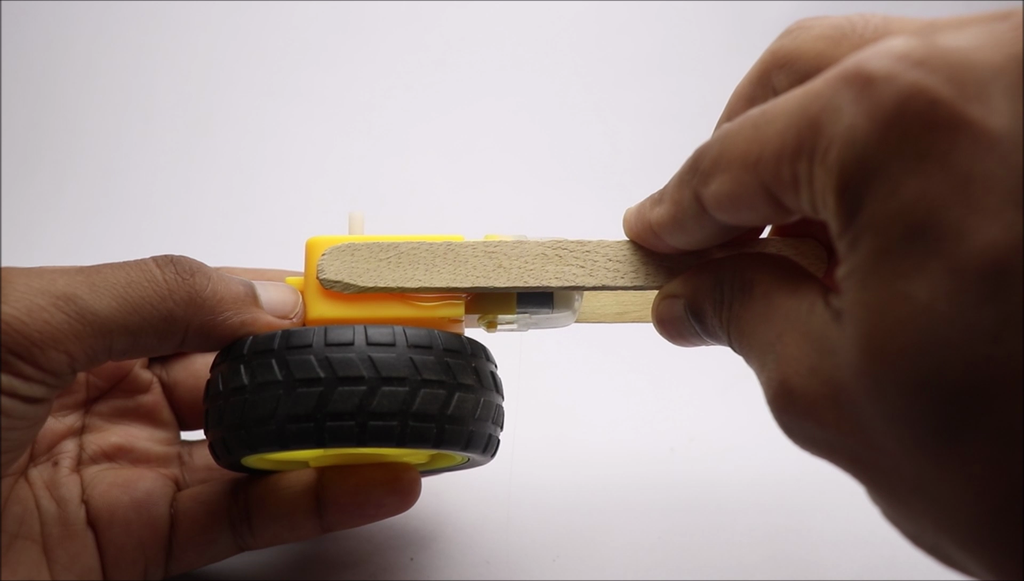
بعد تثبيت العجلات على أعمدة المحركات، نقوم بإضافة عيدان المثلجات على جانبي كل محرك، وقد يبدو هذا الأمر غير ضروري في البداية، إلا أن الهدف منه هو رفع ارتفاع العجلات عن قاعدة الكرتون، مما يسمح للسيارة الروبوتية بتجاوز التضاريس المتوسطة بسهولة أكبر.
يُفضل استخدام كمية كافية من الغراء الحراري لتثبيت عيدان المثلجات بإحكام على محركات BO، ثم تكرار نفس الخطوات مع جميع المحركات الستة لضمان التناسق والاستقرار.




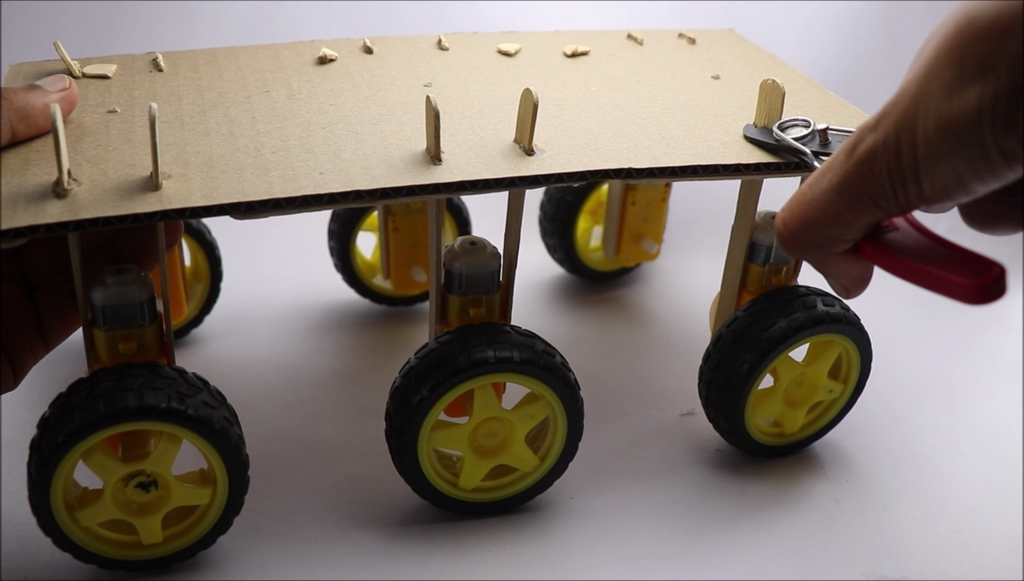
على الرغم من أن الكرتون المقوى يمكنه تحمل الصدمات الناتجة عن حركة العجلات أثناء التشغيل، إلا أنه مع مرور الوقت قد يفقد صلابته ويتعرض للتشوه.
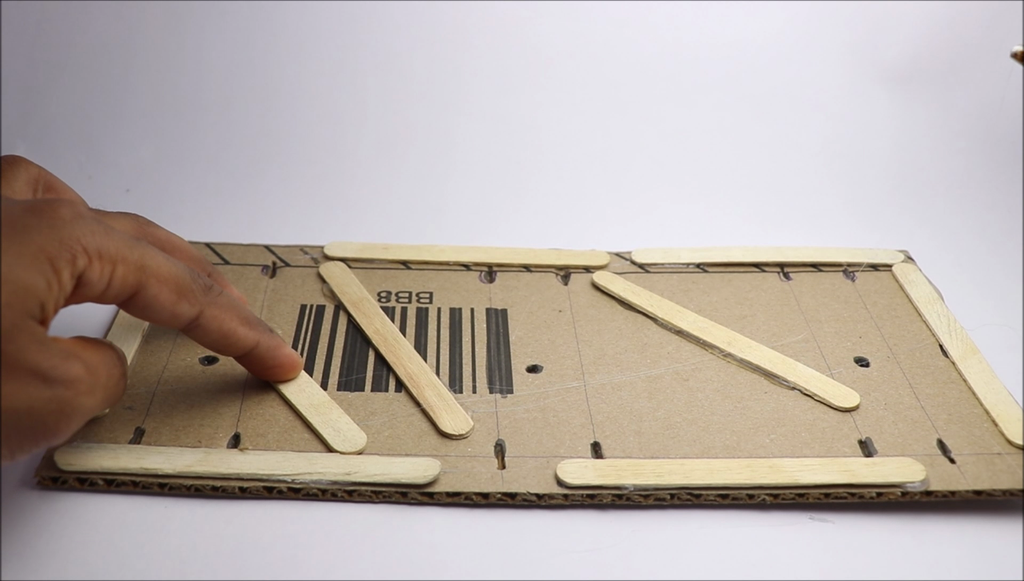
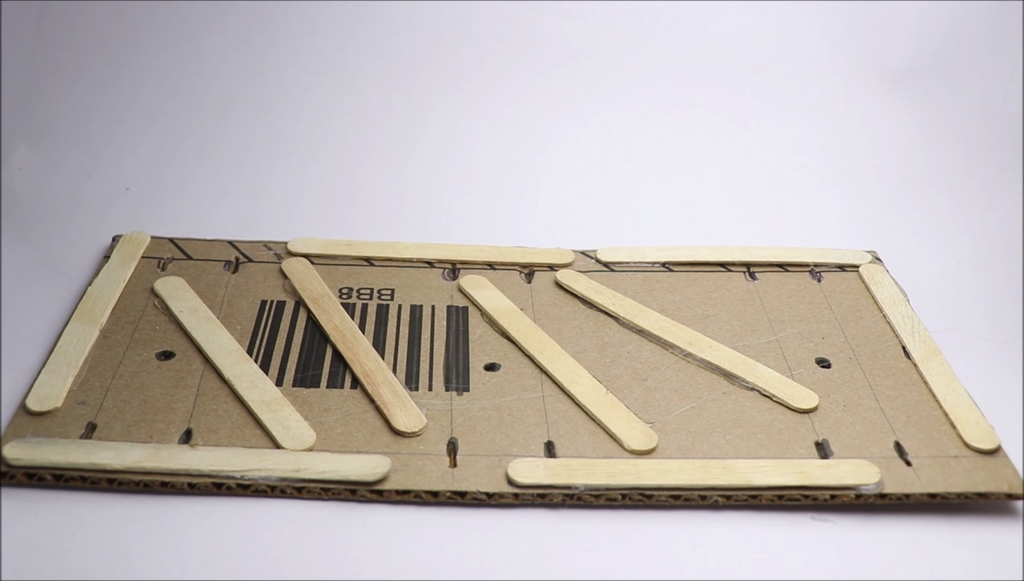
لتجنب هذه المشكلة تم استخدام طريقة بسيطة وفعالة لتدعيم القاعدة، حيث تم لصق عدد من عيدان المثلجات باستخدام الغراء الحراري على كامل سطح الكرتون، مما يزيد من صلابته ويمنحه قوة إضافية.
بعد تنفيذ هذه الخطوة ستلاحظ فرقًا واضحًا في متانة القاعدة، ويمكنك اختبار ذلك بنفسك بمحاولة ثني الكرتون، حيث ستتفاجأ بمدى تحمله.
اترك الغراء حتى يجف تمامًا قبل الانتقال إلى الخطوة التالية، حتى تضمن ثبات جميع الأجزاء.


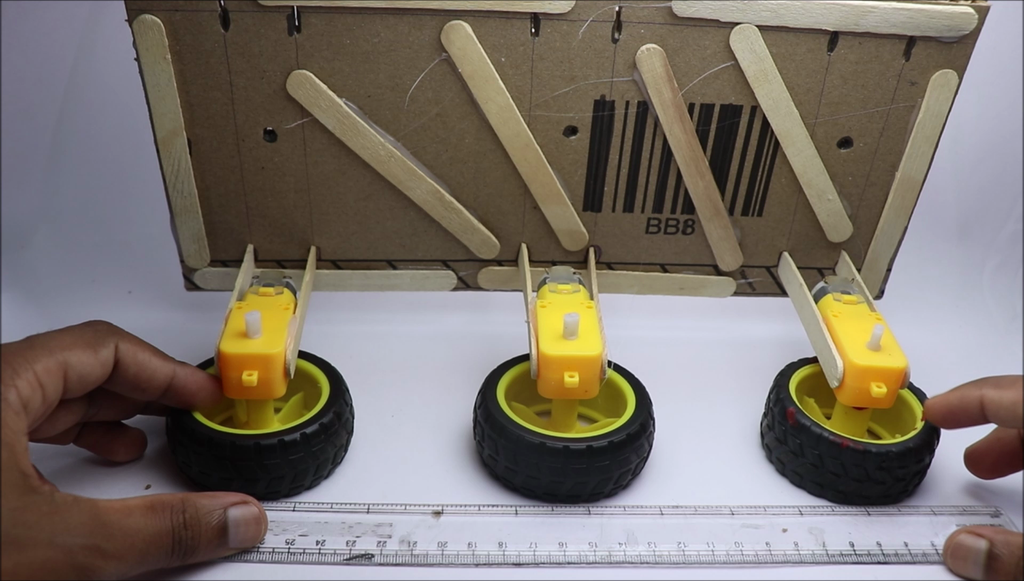
في هذه المرحلة نقوم بتثبيت العجلات على قاعدة الكرتون المدعّمة، وذلك من خلال إدخال الشرائح الخشبية في الفتحات المخصصة، مع البدء من أحد الجوانب.
تم في البداية تثبيت ثلاثة محركات على جانب واحد، ثم التأكد من محاذاة العجلات باستخدام مسطرة أو أي أداة مستقيمة، وإجراء التعديلات اللازمة في حال وجود أي انحراف.
بعد التأكد من استقامة العجلات يتم تكرار نفس الخطوات على الجانب الآخر، ثم استخدام الغراء الفائق لتثبيت الأطراف البارزة بشكل نهائي.
اترك الغراء حتى يجف تمامًا، ثم قم بقص الزوائد باستخدام أداة تقشير الأسلاك للحصول على شكل نظيف ومتناسق.

تُعد الدائرة الكهربائية في هذا المشروع بسيطة نسبيًا، وحتى لو كنت مبتدئًا يمكنك تنفيذها بسهولة عند اتباع الخطوات بدقة.
سأقوم هنا بشرح مخطط الدائرة بشكل مبسط وواضح.
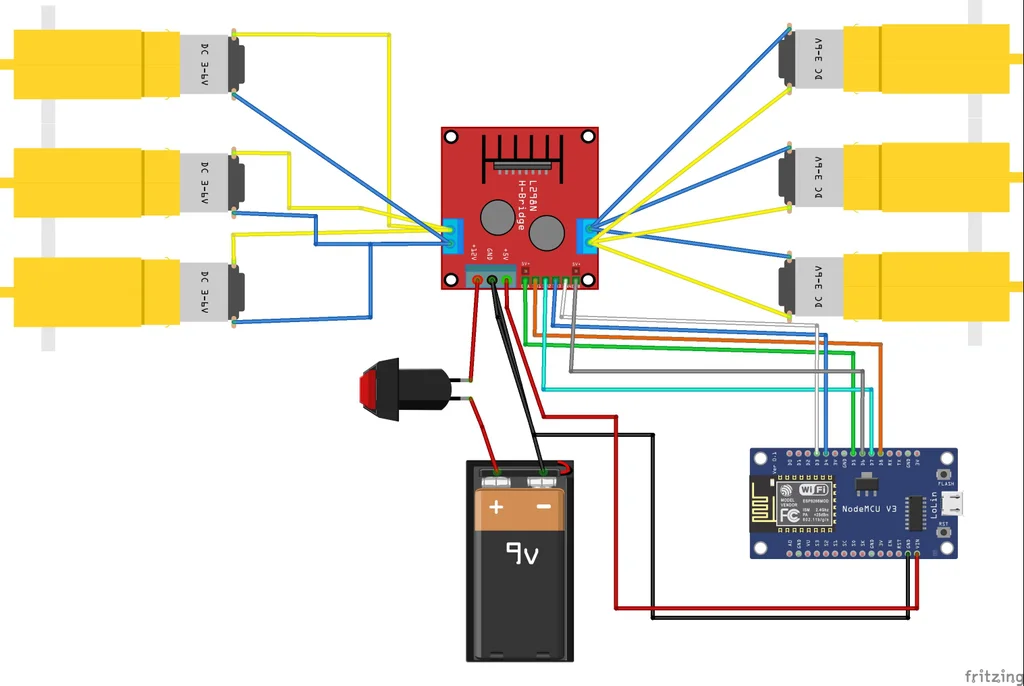
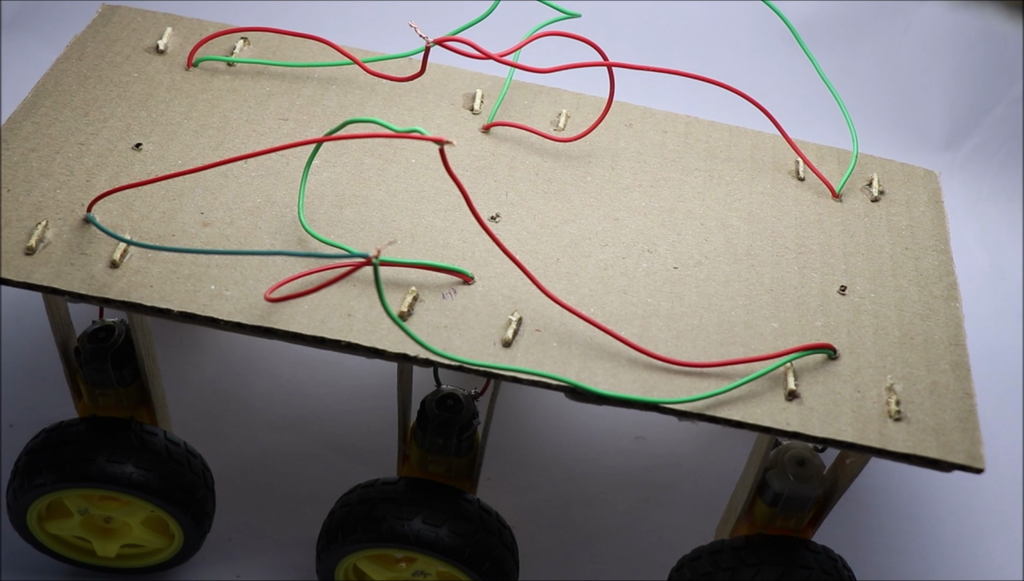
نستخدم في هذا المشروع ستة محركات من نوع BO، حيث يتم توصيل ثلاثة محركات معًا، وكذلك توصيل الثلاثة الأخرى في مجموعة ثانية.
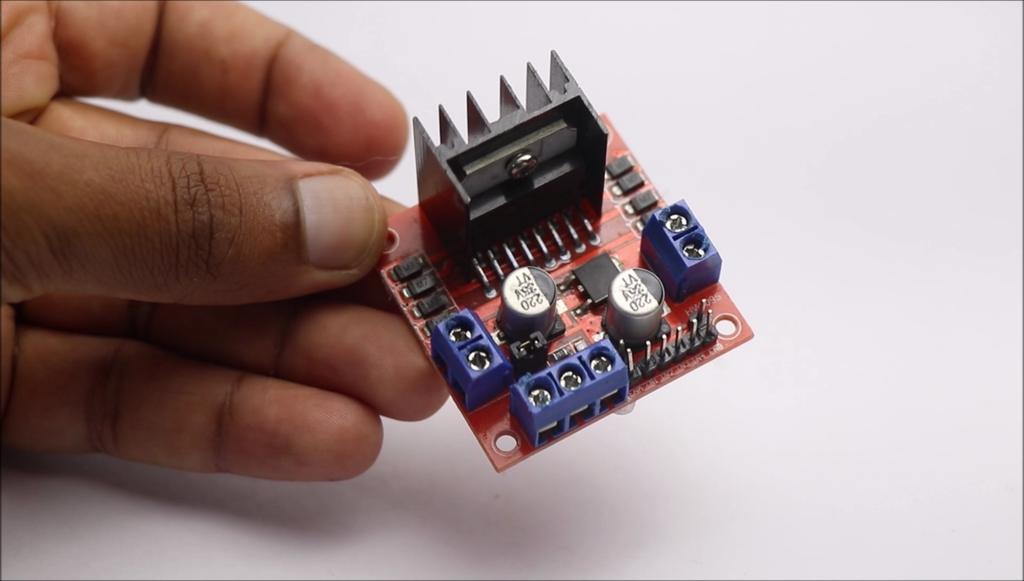
قبل توصيل المحركات بمتحكم المحركات L298N، يجب التأكد من أن اتجاه دوران المحركات الثلاثة في كل مجموعة متطابق، وفي حال وجود اختلاف يتم تبديل أطراف التوصيل لبعض المحركات حتى تعمل جميعها في نفس الاتجاه.
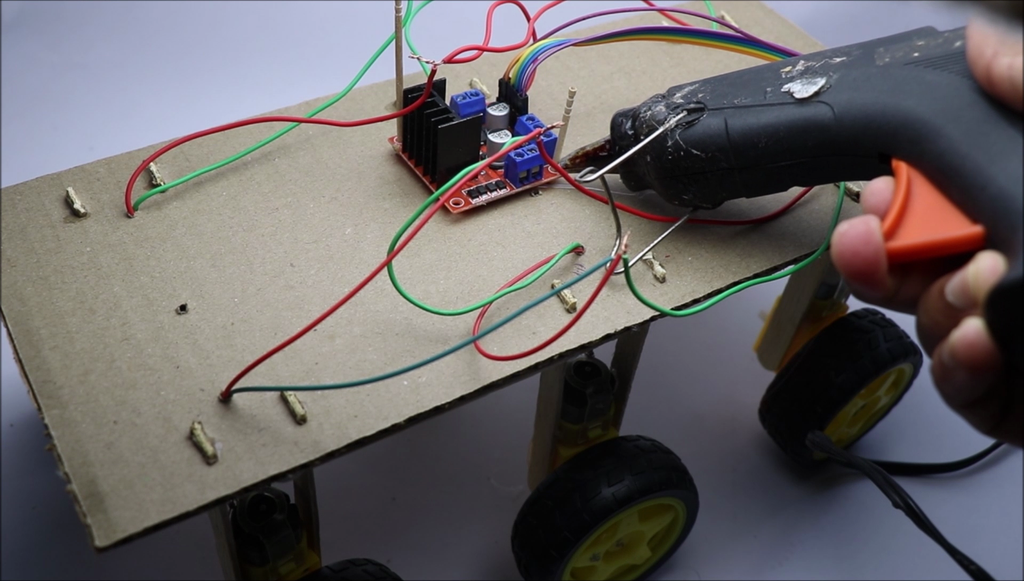
يتم توصيل لوحة NodeMCU مع متحكم المحركات باستخدام أسلاك Jumper، وفق التوصيلات التالية:
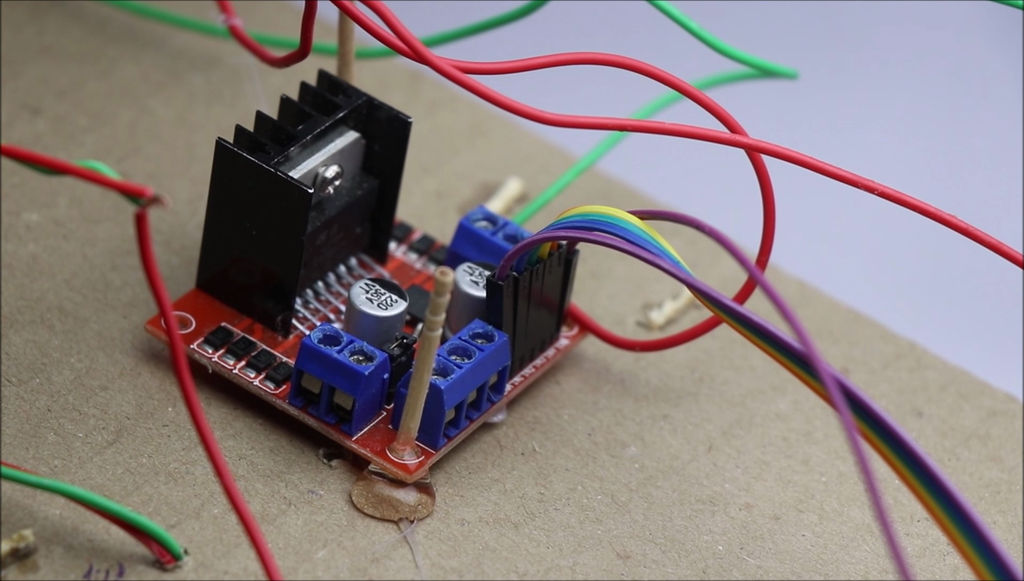
بالنسبة لتوصيل الطاقة يحتوي متحكم L298N على ثلاثة أطراف وهي 12V وGND و5V.
يتم توصيل طرفي GND و5V بلوحة NodeMCU، بينما يتم توصيل البطارية بطرفي 12V وGND عبر مفتاح تشغيل للتحكم في إمداد الطاقة.
بعد الانتهاء من التوصيلات يتم تثبيت متحكم المحركات على القاعدة باستخدام الغراء الحراري، مع إضافة عيدان خشبية داخل فتحاته لزيادة الثبات، وذلك لأن هذا الجزء يتعرض لحركة مستمرة أثناء تشغيل السيارة.
يمكن أيضًا تنفيذ هذه الدائرة باستخدام لوحة PCB للحصول على توصيلات أكثر تنظيمًا واحترافية، مما يساعد على تحسين جودة المشروع وسهولة صيانته.

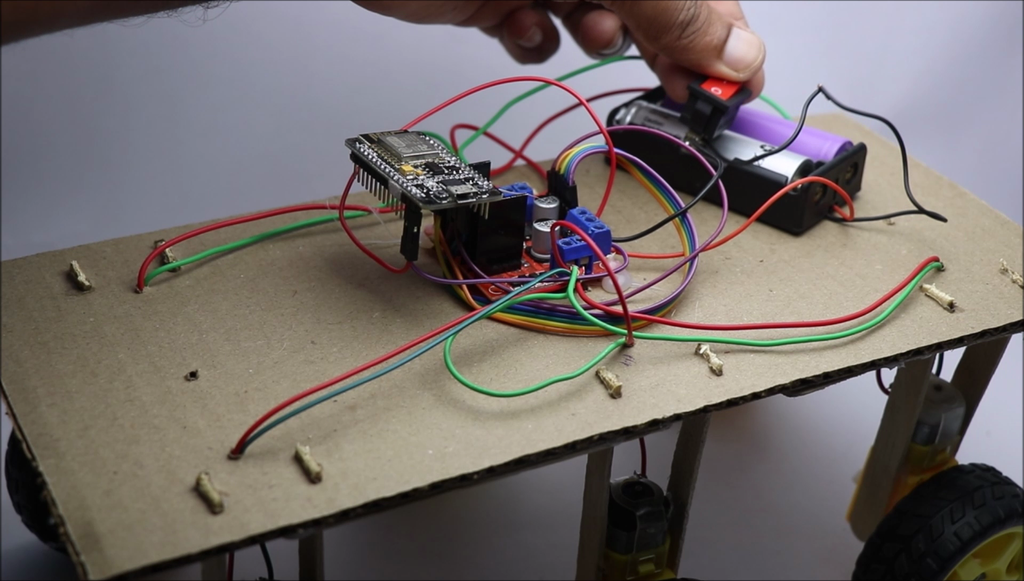
بعد الانتهاء من جميع توصيلات الدائرة الكهربائية، قم برفع الكود البرمجي المرفق على لوحة ESP8266، ثم قم بتوصيل البطارية بالدائرة للتحقق من عمل النظام بشكل صحيح.
قم بتشغيل مفتاح التشغيل لتفعيل الدائرة، وستلاحظ إضاءة مؤشر LED الموجود على لوحة ESP8266، مما يدل على أن اللوحة تعمل بشكل سليم.
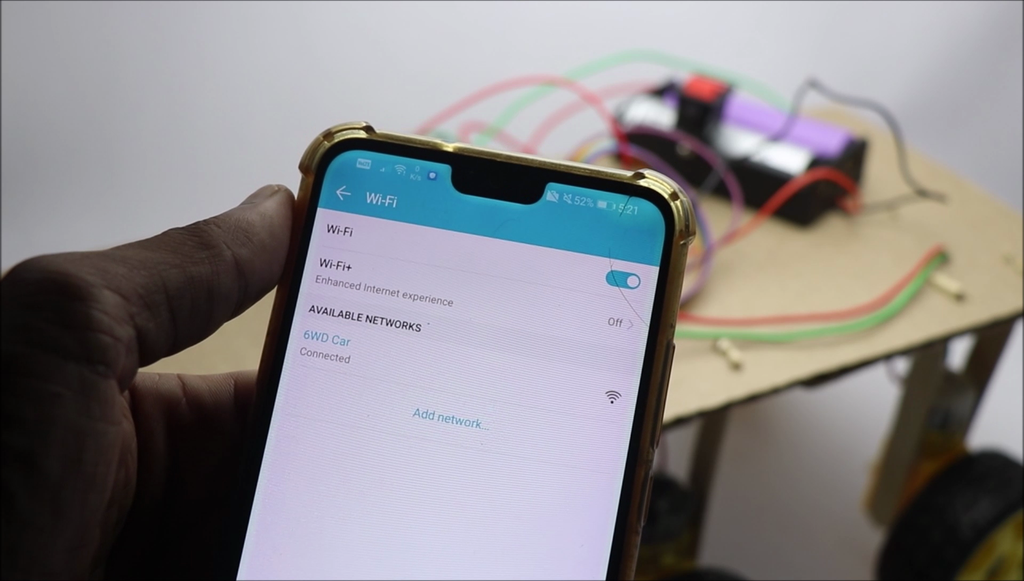
افتح إعدادات Wi-Fi على هاتفك الذكي، وستظهر شبكة باسم 6WD، ولا تحتاج هذه الشبكة إلى كلمة مرور، فقط قم بالضغط عليها ليتم الاتصال مباشرة.
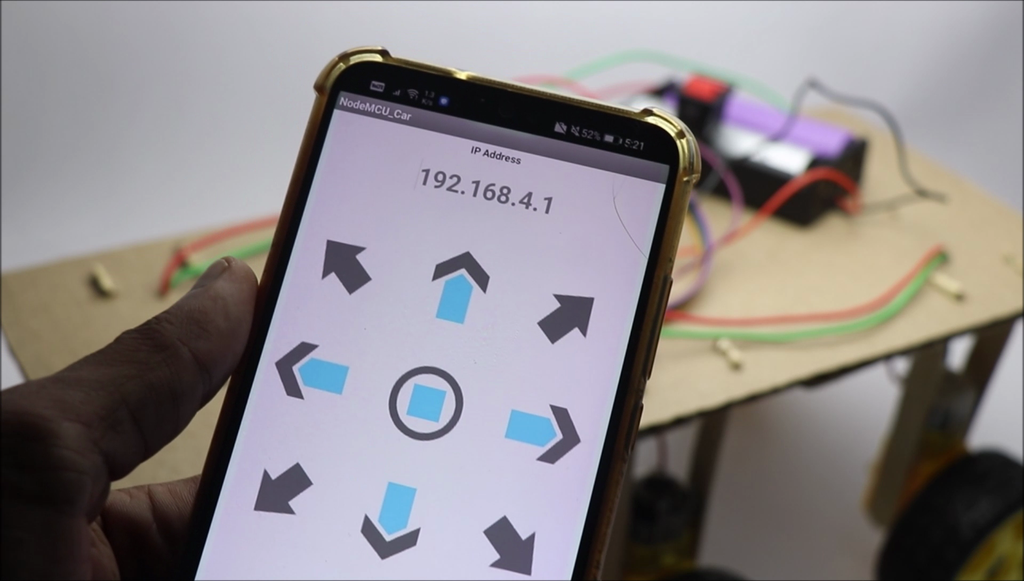
بعد ذلك قم بتثبيت التطبيق المخصص للتحكم بالسيارة على هاتفك، ثم افتحه لتظهر لك واجهة التحكم.
ستجد أزرارًا للتحكم في حركة السيارة، مثل التقدم للأمام، والرجوع للخلف، والانعطاف يمينًا ويسارًا.
إذا تم تنفيذ جميع الخطوات بشكل صحيح فستبدأ السيارة بالاستجابة للأوامر فورًا، وفي حال عدم حدوث ذلك قم بمراجعة التوصيلات مرة أخرى، وغالبًا سيتم حل المشكلة.
لتحميل الكود البرمجي لتصميم سيارة واي فاي 6WD اضغط هنـــا.

تُعد هذه الخطوة اختيارية، ولكنها تضيف لمسة جمالية مميزة للمشروع، لذلك يُنصح بتنفيذها.
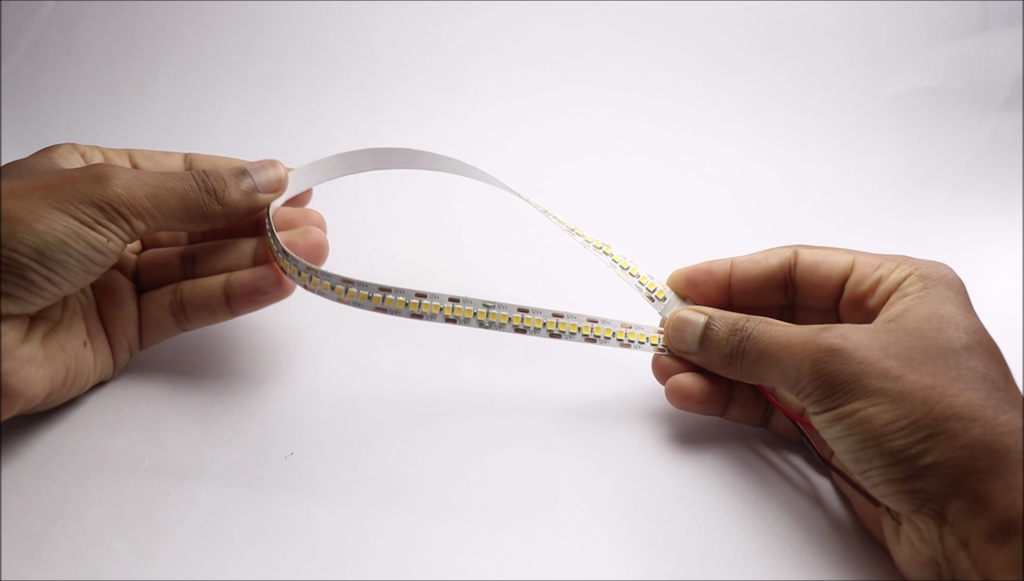
يمكنك تحسين مظهر السيارة الروبوتية عن طريق إضافة شريط إضاءة LED، مما يمنحها شكلًا جذابًا خاصة أثناء التشغيل في الإضاءة الخافتة.
الدائرة المستخدمة بسيطة من نوع تشغيل وإيقاف، وبما أن شريط LED يعمل بجهد 12V، فقد تم توصيل بطاريات 18650 على التوالي، مع إضافة مفتاح للتحكم في الإضاءة.
استخدم المادة اللاصقة الموجودة خلف شريط LED لتثبيته على قاعدة الكرتون.
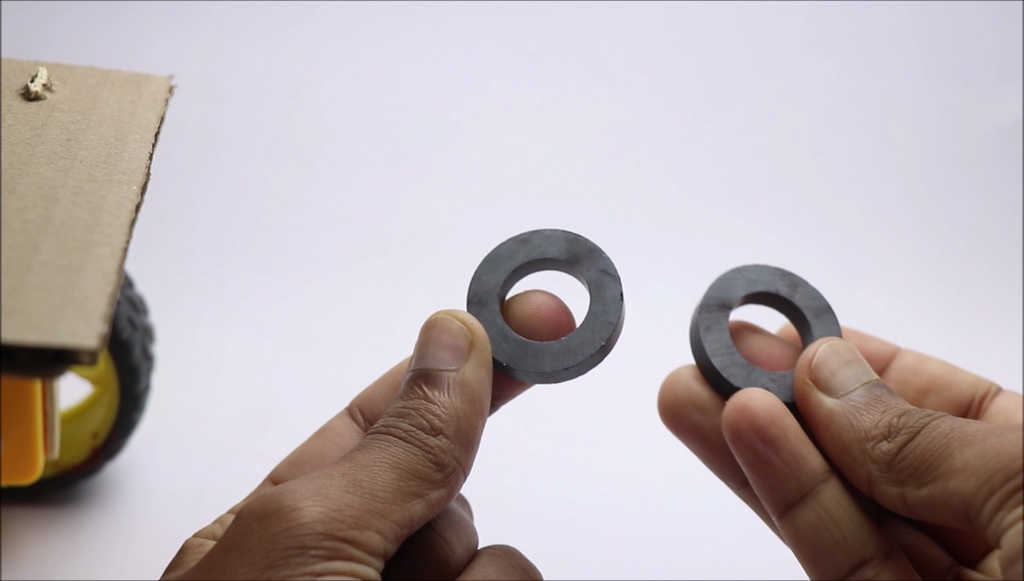
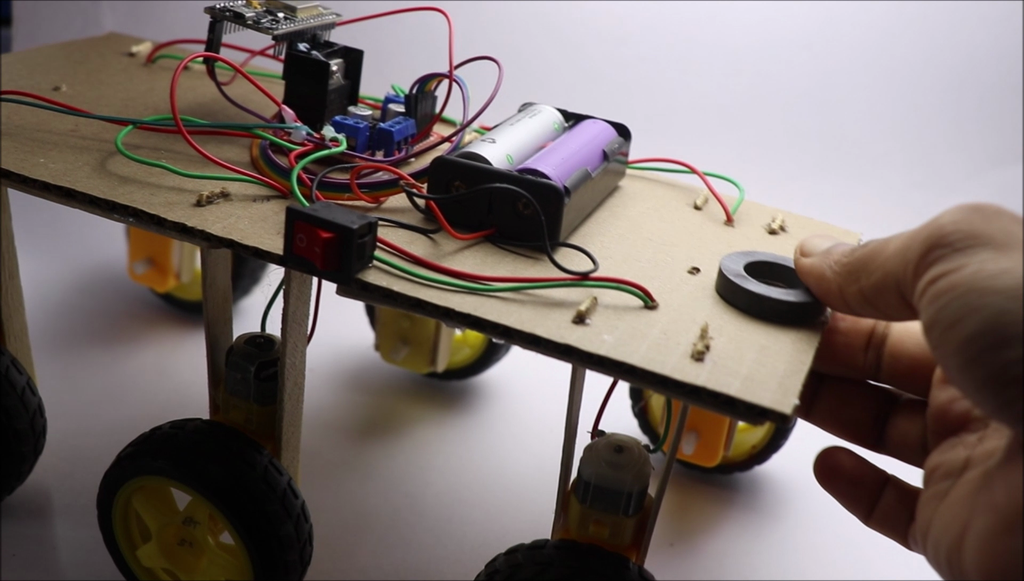
تم إخفاء البطاريات داخل الهيكل للحفاظ على شكل مرتب ونظيف، ولجعل الغطاء قابلًا للفك والتركيب تم استخدام مغناطيس، حيث يتم تثبيت مغناطيس في الغطاء وآخر في القاعدة.




تُعد هذه المرحلة من أكثر المراحل متعة في أي مشروع، حيث تشاهد ما قمت بصناعته يعمل أمامك.
في هذا المشروع تعمل السيارة بنظام دفع سداسي 6WD، أي أن جميع العجلات الست تشارك في الحركة، مما يمنحها قوة وثباتًا عاليين.
تم اختبار السيارة على عدة أنواع من التضاريس، وكانت النتائج ممتازة، حيث تمكنت من تجاوز المطبات والعوائق الصغيرة بسهولة.
لا داعي للقلق بشأن مدة عمل البطارية، فإن البطاريات 18650 معروفة بقدرتها العالية على الاحتفاظ بالشحن لفترات طويلة.
وعند انتهاء الشحن يمكنك ببساطة فتح الغطاء وإخراج البطاريات وإعادة شحنها، ثم إعادة تركيبها والانطلاق لاستكشاف محيطك مرة أخرى.



في هذه المرحلة استعرض أداء السيارة الروبوتية أثناء الحركة في بيئات مختلفة، مما يوضح كفاءة التصميم وقوة التنفيذ، ونأمل أن يكون هذا المشروع قد ألهمك لتجربة المزيد من المشاريع العملية في مجال الإلكترونيات والروبوتات.
جرّب تنفيذ هذا المشروع بنفسك، وإذا كانت لديك أي استفسارات يمكنك طرحها في التعليقات، وشكرًا لك ونتمنى لك تجربة ممتعة وبناءة.




تسجيل الدخول مطلوب
يجب عليك تسجيل الدخول لإضافة تعليق.
تسجيل الدخول